
เมื่อไฟป่ากลายเป็นภัยคุกคามต่อพื้นที่ป่าและชุมชนมากขึ้น สตาร์ทอัพไทยหนึ่งรายผสานเทคโนโลยีดาวเทียมและโดรนเข้ากับโมเดลปัญญาประดิษฐ์ขั้นสูงแบบ Spatio‑Temporal Transformer เพื่อสร้างระบบเฝ้าระวังที่สามารถตรวจจับควันก่อนเปลวไฟจริงปรากฏ ทำให้สามารถแจ้งหน่วยดับเพลิงภายในไม่กี่นาที แทนที่จะรอการรายงานที่ล่าช้าจากการสังเกตด้วยตาเปล่า การผสานข้อมูลระยะกว้างจากดาวเทียมกับภาพเชิงพื้นที่-เวลาแบบเรียลไทม์จากโดรนและเซนเซอร์บนอากาศยานช่วยให้ระบบมีทั้งความครอบคลุมและความละเอียดในการระบุจุดเริ่มต้นของเหตุการณ์ไฟป่า
บทความนี้จะพาอ่านพายพ์ไลน์การทำงานตั้งแต่การสแกนพื้นที่ด้วยดาวเทียม การส่งโดรนตรวจสอบจุดเป้าหมาย ไปจนถึงการประมวลผลด้วย Spatio‑Temporal Transformer ที่เรียนรู้ลักษณะการเคลื่อนที่ของควันและการเปลี่ยนแปลงเชิงเวลาที่เป็นสัญญาณเตือนล่วงหน้า พร้อมนำเสนอผลการประเมินภาคสนามเบื้องต้นที่ชี้ว่าเวลาแจ้งเตือนลดลงจากเดิมเป็นชั่วโมงเหลือเพียงไม่กี่นาที และสามารถลดพื้นที่เสียหายเฉลี่ยได้ในระดับสองหลัก (ตัวอย่างการทดสอบจริงรายงานการลดพื้นที่เสียหายระหว่าง 40–65%) — ข้อมูลที่จะช่วยอธิบายว่าทำไมการผสานดาวเทียม‑โดรนกับ AI เชิงพื้นที่-เวลา จึงอาจพลิกโฉมการจัดการไฟป่าในประเทศไทย
บทนำ: ทำไมต้องระบบเฝ้าระวังไฟป่าผสมดาวเทียม‑โดรน
บทนำ: ทำไมต้องระบบเฝ้าระวังไฟป่าผสมดาวเทียม‑โดรน
ไฟป่าเป็นปัญหาทั้งเชิงสิ่งแวดล้อมและเชิงเศรษฐกิจที่ทวีความรุนแรงขึ้นในระดับภูมิภาคและระดับโลก โดยได้รับผลกระทบจาก ฤดูแล้งที่ยาวนานขึ้น การเปลี่ยนแปลงสภาพภูมิอากาศ และการเปลี่ยนแปลงการใช้ที่ดิน รายงานเชิงภูมิศาสตร์ชี้ให้เห็นว่าในภาพรวมโลกมีพื้นที่ถูกเผาทำลายปีละหลายร้อยล้านเฮกตาร์ ซึ่งนำไปสู่การสูญเสียความหลากหลายทางชีวภาพ การปล่อยก๊าซเรือนกระจกจำนวนมาก และผลกระทบด้านสาธารณสุขจากฝุ่นละออง (PM2.5) ที่ข้ามพรมแดน สำหรับภูมิภาคเอเชียตะวันออกเฉียงใต้ เหตุการณ์ไฟป่าและหมอกควันที่เกิดซ้ำในช่วงไตรมาสแล้งได้สร้างความเสียหายทั้งต่อคุณภาพอากาศและการท่องเที่ยวของประเทศ รวมทั้งสร้างต้นทุนทางเศรษฐกิจเป็นพันล้านบาทในบางปี ซึ่งสะท้อนความจำเป็นในการตอบสนองอย่างรวดเร็วและมีประสิทธิภาพ

การลดผลกระทบจากไฟป่าไม่ได้ขึ้นกับการดับไฟเพียงอย่างเดียว แต่เริ่มจาก การตรวจจับตั้งแต่ระยะควันก่อนเกิดเปลวไฟ (smoke-before-flame) ซึ่งสามารถย่นระยะเวลาตั้งแต่การเกิดเหตุจนถึงการตอบสนองของหน่วยงาน ทำให้สามารถส่งกำลังเข้าไปควบคุมก่อนที่ไฟจะลุกลามเป็นวงกว้าง แนวคิดนี้ได้รับการสนับสนุนจากงานวิจัยและแบบจำลองการแพร่กระจายของเพลิง ที่ชี้ว่าการลดเวลาเตือนเพียงไม่กี่นาทีถึงชั่วโมงสามารถลดพื้นที่ที่ถูกเผาไหม้ได้อย่างมีนัยสำคัญ ขึ้นกับความเร็วของการตอบสนองและลักษณะภูมิประเทศ
แหล่งข้อมูลเดียวมีข้อจำกัดชัดเจนเมื่อนำมาใช้เฝ้าระวังไฟป่า เช่น:
- ดาวเทียม — ให้ภาพครอบคลุมกว้างและติดตามเชิงนโยบายได้ แต่มีข้อจำกัดด้าน ความละเอียดเชิงพื้นที่ (บางดัชนีให้รายละเอียดบดบัง) การถูกบดบังด้วยเมฆหรือควัน และความถี่การสแกนซ้ำ (revisit time) ที่อาจทำให้พลาดควันระยะแรก
- โดรน — ให้ภาพความละเอียดสูงและสามารถมุ่งเป้าเป็นจุดได้ แต่มีข้อจำกัดด้านระยะปฏิบัติการ แบตเตอรี ความเสถียรในสภาพอากาศ และกฎระเบียบการบิน ทำให้ไม่สามารถใช้งานเชิงพื้นที่กว้างหรือใช้อย่างต่อเนื่องได้เสมอไป
การผสานข้อมูลจากดาวเทียมและโดรนทำให้เกิดข้อได้เปรียบเชิงปฏิบัติการ: ดาวเทียมมอบมุมมองกว้างและการติดตามเชิงบริบท ขณะที่โดรนสามารถสืบตรวจแบบละเอียดเป็นเป้าหมายเมื่อดาวเทียมระบุจุดเสี่ยง การผสานกันจึงช่วยให้การตรวจจับ ควันก่อนเปลวไฟ เกิดขึ้นเร็วขึ้นและมีความน่าเชื่อถือมากขึ้น ส่งผลให้ระบบเตือนภัยสามารถแจ้งหน่วยดับเพลิงและผู้เกี่ยวข้องได้ภายในนาที แทนที่จะรอจนเห็นเปลวไฟชัดเจน ซึ่งเป็นจุดเปลี่ยนสำคัญในการลดขนาดพื้นที่เสียหายและลดต้นทุนการควบคุมเพลิง
สตาร์ทอัพไทยที่พัฒนาระบบเฝ้าระวังแบบผสมนี้ใช้แนวทางเชิงนวัตกรรม โดยนำ Spatio‑Temporal Transformer มาประมวลผลชุดข้อมูลดาวเทียมและภาพโดรนเชิงเวลา-เชิงพื้นที่ เพื่อแยกแยะสัญญาณควันที่เปลี่ยนแปลงอย่างละเอียดและแจ้งเตือนหน่วยงานภายในนาที ผลการทดลองภาคสนามของทีมชี้ให้เห็นถึงการเพิ่มความไวในการตรวจจับและลดเวลาแฝงในการแจ้งเตือนอย่างมีนัยสำคัญ ซึ่งมีศักยภาพช่วยลดพื้นที่เสียหายและค่าใช้จ่ายด้านการตอบโต้ได้อย่างเป็นรูปธรรม—ประเด็นที่น่าสนใจสำหรับหน่วยงานภาครัฐและภาคเอกชนที่ต้องการโซลูชันเชิงรุกในการบริหารความเสี่ยงไฟป่า
เทคโนโลยีหลัก: ทำความเข้าใจกับ Spatio‑Temporal Transformer
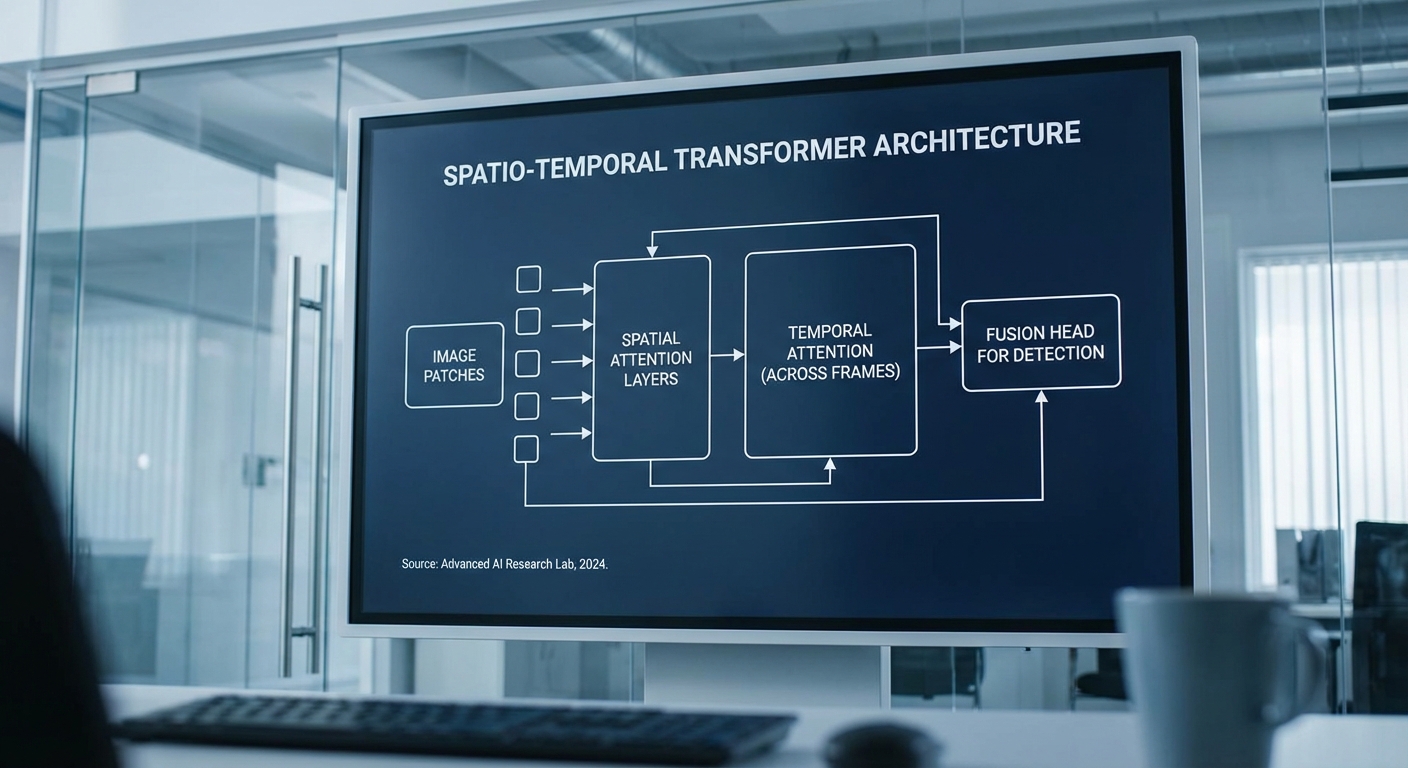
Spatio‑Temporal Transformer เป็นสถาปัตยกรรมเชิงลึกที่ผสานความสามารถของ Transformer ในการจัดการความสัมพันธ์แบบระยะยาว (long‑range dependencies) เข้ากับการประมวลผลข้อมูลเชิงภาพและเชิงเวลา ซึ่งเหมาะอย่างยิ่งสำหรับงานเฝ้าระวังไฟป่าด้วยการผสมข้อมูลจากดาวเทียมและโดรน โดยเฉพาะการตรวจจับควันที่เป็นสัญญาณเตือนก่อนเกิดเปลวไฟ ในระบบของสตาร์ทอัพไทยนี้ โมเดลถูกออกแบบให้เรียนรู้ทั้งความเชื่อมโยงเชิงพื้นที่ (spatial) ภายในเฟรมภาพและความเปลี่ยนแปลงเชิงเวลา (temporal) ข้ามเฟรมอย่างมีประสิทธิภาพ ผลลัพธ์คือการแจ้งเตือนที่รวดเร็วภายในนาที และการลดพื้นที่เสียหายอย่างมีนัยสำคัญเมื่อเทียบกับการเฝ้าระวังแบบเดิม ๆ
ทำไม Transformer จึงเหมาะกับข้อมูลเชิงภาพและเชิงเวลา
หลักการสำคัญของ Transformer คือ mechanism ของ attention ซึ่งคำนวณน้ำหนักการเชื่อมโยงระหว่างทุกตำแหน่งของอินพุต ทำให้โมเดลสามารถจับบริบทระยะไกลได้โดยไม่ต้องอาศัยการคอนโวลูชันเป็นหลัก ในงาน remote sensing ที่สัญญาณควันมักกระจายเป็นแพทเทิร์นบาง ๆ หรือโปร่งแสง การมีมุมมองเชิงรวม (global context) ช่วยให้ระบบแยกควันจากเมฆ หมอก หรือควันเก่าได้ดีกว่า นอกจากนี้ Transformer ยังรองรับการประมวลผล sequence แบบขนาน ทำให้สามารถวิเคราะห์เฟรมวิดีโอจากโดรนและภาพดาวเทียมต่อเนื่องได้รวดเร็วพอสำหรับการแจ้งเตือนภายในนาที
การจัดการ sequence ของภาพดาวเทียมและเฟรมวิดีโอโดรน
การนำภาพหลายแหล่งหลายช่วงเวลาเข้าระบบ ทำได้โดยการแปลงภาพเป็น sequence ของ patch tokens (patch embedding) สำหรับแต่ละเฟรม และเพิ่ม positional encoding แยกสำหรับมิติ space และ time เช่น ใช้ 2D positional encoding ภายในเฟรม และ 1D temporal encoding ข้ามเฟรม จากนั้นส่ง token เหล่านี้เข้าสู่ encoder ที่ประกอบด้วยชุดของบล็อก attention แบบ factorized หรือ joint spatio‑temporal attention
- Patch embedding: แยกภาพเป็น patch ขนาดเหมาะสม (เช่น 16x16 หรือ multi‑scale patches) เพื่อควบคุมขนาดของ sequence
- Positional encodings: ให้ข้อมูลตำแหน่งทั้งเชิงพื้นที่และเชิงเวลา (2D + 1D) เพื่อให้โมเดลรู้ว่าทุก token อยู่ตรงไหนและเมื่อไหร่
- Frame stacking / sliding window: ใช้หน้าต่างเวลาสั้น (เช่น 5–10 เฟรม) เพื่อจับการเคลื่อนไหวของควันและลด latency
กลไก attention ระหว่างมิติ spatial และ temporal
สถาปัตยกรรม Spatio‑Temporal Transformer มักเลือกกลยุทธ์ attention สองรูปแบบหลัก:
- Factorized attention (spatial‑then‑temporal): ประมวลผล attention ในมิติ spatial ภายในแต่ละเฟรมก่อน แล้วตามด้วย temporal self‑attention ข้าม token ของเฟรมต่าง ๆ วิธีนี้ลดความซับซ้อนเชิงคำนวณและอนุญาตให้จับลักษณะเชิงพื้นที่อย่างละเอียด ก่อนรวมบริบทเชิงเวลา
- Joint spatio‑temporal attention: คำนวณ attention ระหว่างทุก token ข้าม space และ time พร้อมกัน เหมาะกับการจับสัญญาณที่มีความสัมพันธ์พื้นที่‑เวลาโดยตรง แต่ต้องการทรัพยากรสูง จึงมักใช้รูปแบบ attention ประหยัดเช่น windowed attention หรือ deformable attention
ในเชิงปฏิบัติ สตาร์ทอัพมักใช้ hybrid approach: บล็อก spatial attention แบบหลายระดับ (multi‑scale) เพื่อสกัดลักษณะพื้นผิวและคอนทราสต์ของควัน แล้วใช้ temporal self‑attention หรือ cross‑attention เพื่อเน้นการเปลี่ยนแปลงและการเคลื่อนที่ของควันเมื่อเวลาผ่านไป
ตัวอย่างชั้น (layers) ที่ใช้ในสถาปัตยกรรม
- Input layer / Patch embedding: แปลงภาพดาวเทียมและเฟรมโดรนเป็น tokens พร้อมเพิ่ม spectral channel (เช่น RGB + NIR/SWIR) และ positional encodings
- Spatial attention block: Multi‑head self‑attention ภายในเฟรม เพื่อดึงฟีเจอร์เชิงพื้นที่ระดับต่าง ๆ (รวม multi‑scale pooling และ convolutional stem เพื่อรักษา locality)
- Temporal self‑attention: Multi‑head attention ข้ามเฟรม เพื่อจับโมชัน การเพิ่มขึ้นของควัน หรือรูปแบบการกระจายที่เปลี่ยนไปเมื่อเวลา
- Fusion / Cross‑attention head: ส่วนที่รวมข้อมูลจากดาวเทียม (มุมมองกว้าง) และโดรน (มุมมองละเอียด) โดยใช้ cross‑attention เพื่อให้โดรนเน้นพื้นที่ที่ดาวเทียมระบุว่ามีความเสี่ยง
- Detection / Segmentation heads: หัวสำหรับการคาดการณ์หลายงาน เช่น segmentation mask ของควัน, bounding box/center‑based localization และ early‑warning score (probability ของ smoke signature)
- Refinement & multi‑scale decoder: ชั้น decoder แบบ FPN/transformer decoder ที่ให้ผลลัพธ์ละเอียดจากฟีเจอร์หลายระดับ
การออกแบบ head สำหรับตรวจจับควัน (smoke signature) ก่อนเปลวไฟ
หัวตรวจจับควันต้องออกแบบให้ไวต่อสัญลักษณ์เฉพาะที่มักเกิดก่อนไฟลุกลาม เช่น ผืนควันโปร่งแสง การแพร่กระจายช้า และการเปลี่ยนแปลงค่าความสว่างในย่านสเปกตรัมเฉพาะ (เช่น NIR/SWIR) กลยุทธ์สำคัญได้แก่:
- Multi‑task heads: รวมหัว segmentation เพื่อระบุรูปร่างควัน และหัว classification/score เพื่อประเมินความเสี่ยงเป็นลำดับก่อนเกิดเปลวไฟ
- Temporal continuity loss: เพิ่ม loss ที่ลงโทษการคาดการณ์ที่ไม่ต่อเนื่องหรือขัดแย้งกันข้ามเฟรม (ensures stable early‑warning)
- Spectral attention: หัวย่อยที่เรียนรู้ให้ให้ความสำคัญกับแชนเนล NIR/SWIR ซึ่งมักช่วยแยกควันจากเมฆและควันเก่า
- Uncertainty estimation: ให้คะแนนความเชื่อมั่น (confidence) และเวลาความเป็นไปได้ของการลุกลาม (time‑to‑flare) เพื่อช่วยผู้ปฏิบัติงานตัดสินใจ
เทคนิค regularization และ data augmentation สำหรับข้อมูล remote sensing
ข้อมูลด้าน remote sensing มีความท้าทายเฉพาะ เช่น class imbalance (ควันเป็นกรณีหายาก), สภาวะชวนสับสน (เมฆ หมอก ฝุ่น), และความหลากหลายของเซ็นเซอร์ เทคนิค regularization และ augmentation ที่นิยมใช้ ได้แก่:
- Spatial augmentations: การหมุน พลิก ครอปแบบสุ่ม การสเกล และการปรับความคมชัด เพื่อเพิ่มความทนทานต่อมุมกล้องและความละเอียดต่าง ๆ
- Spectral / Radiometric augmentations: ปรับค่าแบนด์ ความสว่าง คอนทราสต์ เพิ่มสัญญาณรบกวน (sensor noise) หรือปรับแบนด์เฉพาะ (channel dropout) เพื่อจำลองสภาพการใช้งานจริงของดาวเทียมและโดรน
- Temporal augmentations: การสุ่มลดเฟรม (frame drop), time‑warping, jitter ของ timestamp และการสลับลำดับเฟรมบางส่วน เพื่อให้โมเดลไม่พึ่งพารูปแบบการเคลื่อนไหวตายตัว
- CutMix / MixUp / RandAugment: เทคนิคผสมภาพเพื่อสร้างตัวอย่างใหม่และลด overfitting
- Patch masking & dropout: ปิดบาง patch ระหว่างการฝึก (inspired by MAE) เพื่อให้โมเดลเรียนรู้บริบทที่เหลือแทนการพึ่งพาแพทเทิร์นเดี่ยว
- Class imbalance handling: Focal loss, weighted sampling, และ oversampling ของเหตุการณ์ควัน เพื่อปรับปรุงการตรวจจับกรณีหายาก
- Self‑supervised / contrastive pretraining: ใช้ pretraining บนชุดภาพดาวเทียมขนาดใหญ่ (ไม่มีป้ายกำกับ) เช่น contrastive learning เพื่อได้ฟีเจอร์เริ่มต้นที่แข็งแรงก่อนทำ fine‑tune กับงานตรวจจับควัน
นอกจากนี้ ยังมีแนวทางด้านประสิทธิภาพเชิงคำนวณ เช่น การใช้ windowed attention (Swin‑like), sparse/deformable attention หรือการลดความละเอียดเชิงพื้นที่เพื่อรักษา latency ในการทำงานจริง ระบบที่ออกแบบดีสามารถแจ้งเตือนภายใน 1–3 นาที และในกรณีทดลองภาคสนามช่วยลดพื้นที่ความเสียหายได้อย่างมีนัยสำคัญ (ตัวอย่างเช่นการลดได้ราว 50–70% เมื่อเทียบกับกระบวนการตรวจจับแบบเดิมที่ช้ากว่า) โดยคงสมดุลระหว่างความเร็ว ความแม่นยำ และทรัพยากรการประมวลผล
สรุปแล้ว Spatio‑Temporal Transformer ให้เฟรมเวิร์กที่ยืดหยุ่นในการผนวกข้อมูลเชิงพื้นที่และเชิงเวลา การออกแบบบล็อก attention ที่เหมาะสมร่วมกับหัวตรวจจับควันเฉพาะ และการใช้เทคนิค regularization/augmentation ที่ตรงกับลักษณะข้อมูล remote sensing จะเป็นกุญแจสำคัญในการสร้างระบบเฝ้าระวังไฟป่าที่แม่นยำและตอบสนองได้รวดเร็ว
ข้อมูลและเซ็นเซอร์: ดาวเทียม vs โดรน — ข้อดี ข้อจำกัด และการเตรียมข้อมูล
ภาพรวมข้อมูลและเซ็นเซอร์: ดาวเทียม vs โดรน
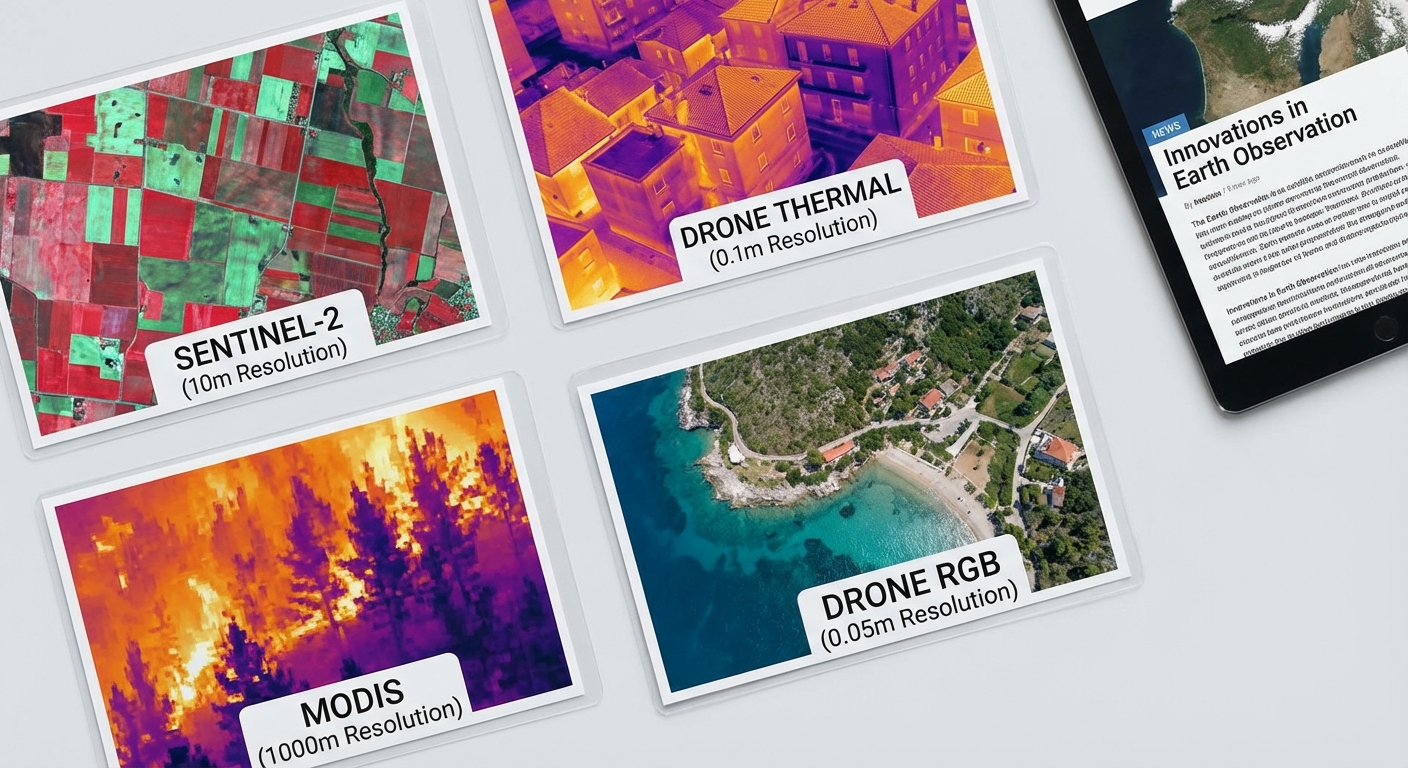
ระบบเฝ้าระวังไฟป่าร่วมดาวเทียม‑โดรนต้องอาศัยข้อมูลจากเซ็นเซอร์หลายระดับเพื่อให้ครอบคลุมทั้งมิติพื้นที่และเวลาที่แตกต่างกัน ในภาพรวม ดาวเทียม ให้ภาพเชิงกว้าง (wide‑area) เหมาะสำหรับการตรวจสอบแนวรุกของไฟป่าระดับภูมิภาค ขณะที่ โดรน ให้ความละเอียดเชิงพื้นที่สูงและรีแอคชันแบบ near‑real‑time เหมาะสำหรับการยืนยันเหตุและนำทางหน่วยดับเพลิง ตัวอย่างชุดข้อมูลเชิงปฏิบัติที่ใช้บ่อยได้แก่ Sentinel‑2, MODIS, VIIRS บนฝั่งดาวเทียม และภาพ RGB, thermal, multispectral จากโดรน
ตัวอย่างความละเอียดเชิงพื้นที่และเชิงเวลา (approximate):
- Sentinel‑2: ความละเอียดเชิงพื้นที่ 10–20 เมตร (บางช่องสเปกตรัม), revisit เวลา ~5 วัน (สองดาวเทียมร่วมกัน) — เหมาะสำหรับการมอนิเตอร์พื้นที่ระดับหลายสิบ-หลายร้อยตารางกิโลเมตร
- MODIS (Terra/Aqua): ความละเอียด 250–1000 เมตร, revisit รายวัน (สองภารกิจหลัก) — เหมาะสำหรับการตรวจจับ hotspot ขนาดใหญ่และการติดตามการกระจายควันแบบกว้าง
- VIIRS (Suomi NPP / NOAA‑20): ความละเอียด ~375–750 เมตร (I‑band/N‑band), revisit ประมาณ 1–2 ครั้งต่อวัน — มีความสามารถในการตรวจจับจุดความร้อน (active fires) ที่ละเอียดกว่าระดับ MODIS
- โดรน (UAV): RGB สามารถให้ความละเอียดเชิงพื้นที่ระดับเซนติเมตร/พิกเซลขึ้นกับความสูง (เช่น 2–5 cm/px ที่ความสูงปฏิบัติการทั่วไป), thermal sensor มักมีความละเอียดสนามภาพเช่น 320×240 ถึง 640×512 พิกเซล (ความแม่นยำอุณหภูมิ ~±1–3°C), multispectral เช่น 4–5 แบนด์สำหรับแยกอาการพืช/ควัน
ข้อดี ข้อจำกัด และการเลือกเซ็นเซอร์ตามการใช้งาน
Trade‑off ระหว่างความละเอียดกับการอัพเดต: ดาวเทียมที่ให้ความละเอียดสูงเช่น PlanetScope หรือ commercial high‑res อาจให้ spatial resolution ต่ำกว่า 5 เมตร แต่มีค่าใช้จ่ายและการเข้าถึงที่จำกัด ขณะที่เซ็นเซอร์สาธารณะอย่าง Sentinel‑2 ให้ความละเอียดปานกลาง (10–20 เมตร) และฟรี แต่มีรีวิสิตที่ห่างกว่า การเลือกจึงต้องพิจารณาจากงบประมาณ ขอบเขตการเฝ้าระวัง และความถี่ที่ต้องการ
ข้อจำกัดเชิงฟิสิกส์และสภาพอากาศ: ทั้งดาวเทียมและโดรนที่ใช้แบนด์ออปติคัล (visible/NIR) ถูกจำกัดโดย cloud cover และ smoke obscuration — ควันหนาอาจปกปิด hotspot ทางสายตา ในทางตรงกันข้าม thermal sensors สามารถตรวจจับความร้อนผ่านควันบางระดับได้ดีกว่า แต่ก็ยังถูกจำกัดเมื่อควันหนาหรือเมื่อความต่างอุณหภูมิต่ำ
เซ็นเซอร์โดรนที่แนะนำ:
- RGB — ใช้สำหรับการจำแนกบริบทพื้นผิวและการจัดทำ orthomosaic ความละเอียดสูง
- Thermal/IR — จำเป็นสำหรับการตรวจจับจุดความร้อน/ควันที่มองไม่เห็นจาก RGB โดยเฉพาะในช่วงกลางคืนหรือเมื่อควันบางระดับบดบัง
- Multispectral (รวม NIR/Red Edge) — ช่วยแยกควันจากพื้นหลังพืชและดิน ผ่านดัชนีเช่น NDVI หรือ NDSI ที่ช่วยลด false‑positives
- GNSS/IMU (RTK/PPK) — สำหรับการทำ geo‑registration ที่แม่นยำและสนับสนุนการผสานข้อมูลข้ามเซ็นเซอร์
ขั้นตอนการเตรียมข้อมูล (Preprocessing) ที่สำคัญสำหรับระบบผสม
การเตรียมข้อมูลเป็นหัวใจสำคัญของความแม่นยำของโมเดล Spatio‑Temporal Transformer โดยกระบวนการหลักที่องค์กรธุรกิจต้องวางมาตรฐานได้แก่:
- Radiometric calibration: แปลงค่า DN ของเซ็นเซอร์เป็น Top‑Of‑Atmosphere (TOA) reflectance หรือ radiance สำหรับดาวเทียม และจาก raw digital number ของโดรนเป็น surface reflectance ด้วยการใช้ calibration panel (โดรน) หรือซอฟต์แวร์เช่น Sen2Cor สำหรับ Sentinel‑2
- Atmospheric correction: ลบผลกระทบบรรยากาศ (aerosols, water vapor) โดยใช้โมดูลเฉพาะ เช่น Sen2Cor, ACOLITE หรือ 6S เพื่อให้ค่าที่เปรียบเทียบระหว่างช่วงเวลาต่าง ๆ ได้
- Cloud & smoke masking: ใช้ QA bands, Fmask,หรือโมเดลเรียนรู้เพื่อลงตราประทับพิกเซลที่ถูกคลุมโดยเมฆหรือควัน — ควรมีการแยกระหว่างเมฆ (reflective) กับควัน (aerosol scattering) เนื่องจากผลต่อการตรวจจับแตกต่างกัน
- Geo‑registration และ orthorectification: จัดแนวภาพดาวเทียมและโดรนให้อยู่ในระบบพิกัดเดียวกันโดยใช้ DEM และ GCP/RTK เพื่อให้การผสานข้อมูลแบบ pixel‑wise เป็นไปอย่างแม่นยำ (ความคลาดเคลื่อนระดับเมตรอาจทำให้ false alarms เพิ่ม)
- Spatial/temporal resampling: ปรับความละเอียดเชิงพื้นที่และเวลาให้สามารถรวมเข้าด้วยกันได้ เช่น การอัพแซมปลิงภาพดาวเทียมเป็นตารางความละเอียดที่โดรนใช้ หรือการรวมภาพเป็น time‑series window (เช่น stack 3–7 timestamps ล่าสุด) เพื่อให้โมเดลจับพฤติกรรมการพัฒนาของควัน/ไฟ
- Noise reduction และ radiometric normalization: ฟิลเตอร์ลดสัญญาณรบกวน การถ่วงน้ำหนักฮาร์โมไนซ์สเปกตรัมข้ามแพลตฟอร์ม และ normalization เพื่อชดเชยเงื่อนไขแสง/มุม
- Patch extraction / sliding windows: ตัดภาพเป็น patches (ตัวอย่างเช่น 64×64 หรือ 128×128 พิกเซลสำหรับ Sentinel‑2; 256×256 หรือใหญ่กว่าในโดรน) พร้อม overlap เพื่อนำเข้าโมเดล Spatio‑Temporal Transformer — การเลือกขนาดและขั้นทับ (stride) จะส่งผลต่อความไวต่อการตรวจจับบริเวณเล็ก ๆ
- Data augmentation และ class balancing: เนื่องจากเหตุการณ์ควัน/ไฟเป็นเหตุการณ์หายาก ต้องมีการเพิ่มตัวอย่างเทียม เช่น การหมุน คร็อป ปรับแสง และการสุ่ม noise เพื่อช่วยลด overfitting และเพิ่มความทนต่อสภาพแวดล้อมหลากหลาย
การผสานข้อมูลและแนวปฏิบัติทางธุรกิจ
ในทางปฏิบัติ การรวมข้อมูลดาวเทียมและโดรนต้องมีกรอบการทำงานที่ชัดเจน: ดาวเทียมใช้สำหรับการสำรวจเชิงรุกแบบกว้างเพื่อตั้งค่าพื้นที่น่าสงสัย (hotspot candidates) และโดรนถูกปล่อยขึ้นเพื่อยืนยัน ตรวจวัดอุณหภูมิจริง และให้ภาพละเอียดสำหรับการแจ้งเตือนหน่วยปฏิบัติการ การนำเข้าข้อมูลเข้าสู่ Spatio‑Temporal Transformer ต้องมีการทำ standardization ของ preprocessing pipeline เพื่อให้ latency ต่ำสุด โดยทั่วไปองค์กรควรกำหนด SLA ในการประมวลผลภาพดาวเทียม (เช่น 30–60 นาทีหลังรับข้อมูล) และการปฏิบัติการโดรน (ขึ้นบินภายในนาที–ชั่วโมง ขึ้นกับบริบท)
สรุปคือ การออกแบบระบบเฝ้าระวังไฟป่าแบบผสมต้องให้ความสำคัญกับการเลือกเซ็นเซอร์ที่เหมาะสมตามเป้าหมาย (coverage vs. resolution), การจัดการข้อจำกัดด้านสภาพอากาศ และการตั้งมาตรฐาน preprocessing (calibration, geo‑registration, cloud/smoke masking, patching) เพื่อให้โมเดลเชิงพื้นที่และเวลาให้ผลลัพธ์ที่เชื่อถือได้และพร้อมใช้งานเชิงปฏิบัติการโดยธุรกิจและหน่วยงานดับเพลิง
พายพ์ไลน์ระบบ: จากการรับข้อมูลถึงการแจ้งเตือนภายในนาที
พายพ์ไลน์ระบบ: จากการรับข้อมูลถึงการแจ้งเตือนภายในนาที
ระบบเฝ้าระวังไฟป่าแบบผสมดาวเทียม‑โดรนของสตาร์ทอัพไทยออกแบบเป็นพายพ์ไลน์ end‑to‑end ที่มุ่งเป้าให้สามารถ ตรวจจับควันและความผิดปกติเชิงพื้นที่‑เวลา (spatio‑temporal) แล้วส่งต่อการแจ้งเตือนไปยังหน่วยดับเพลิงได้ภายในนาที การทำงานแบ่งเป็นขั้นตอนชัดเจน: ingestion → preprocessing → model inference (batch vs streaming) → fusion → anomaly detection & confidence scoring → alerting/dispatch โดยใช้ Spatio‑Temporal Transformer เป็นแกนกลางสำหรับการวิเคราะห์เวลา‑เชิงพื้นที่ สำหรับภาพรวมสถาปัตยกรรมและการไหลของข้อมูล โปรดดูแผนภาพประกอบด้านล่าง
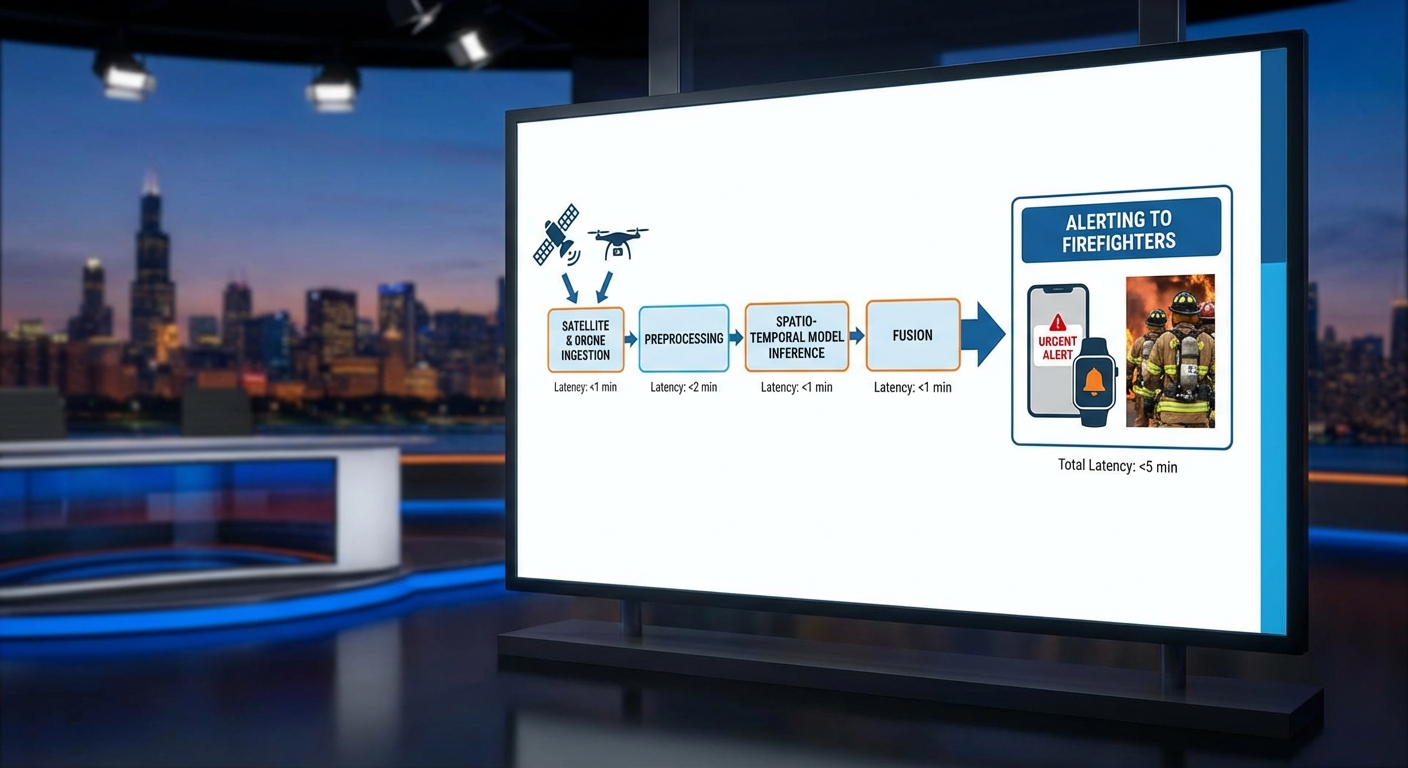
Ingestion — ระบบรับข้อมูลจากแหล่งหลายระดับ: ดาวเทียม near‑real‑time (constellation เชิงพาณิชย์และเซนเซอร์สาธารณะ) ที่มีการส่งภาพและสารสนเทศความร้อนเป็นชุด (revisit time ประมาณ 10–60 นาที ขึ้นกับผู้ให้บริการ) และโดรนที่ถูก tasking แบบ on‑demand เพื่อเก็บวิดีโอและภาพความละเอียดสูง (sub‑meter) เมื่อตรวจพบสัญญาณเริ่มต้นจากดาวเทียมหรือเซนเซอร์ภาคพื้น ระบบจะส่งคำสั่ง tasking ไปยังโดรนภายในวินาที–นาที โดยมีช่องทางการสื่อสารสำรองเช่น 4G/5G และดาวเทียมสื่อสารเพื่อให้ได้ภาพยืนยันเร็วที่สุด
Preprocessing — ข้อมูลแต่ละแหล่งต้องผ่านการปรับแต่งก่อนป้อนโมเดล: การแก้ geometric/ radiometric, geo‑referencing และ cloud masking สำหรับดาวเทียม ส่วนโดรนจะทำการ stabilization, de‑noise และ frame sampling ที่ edge เพื่อกรองข้อมูลไม่จำเป็น ก่อนส่งเฉพาะเหตุการณ์ที่น่าสงสัยขึ้นคลาวด์ เพื่อลดแบนด์วิธและความหน่วง การทำ Preprocessing แบ่งเป็นสองชั้น: edge processing บนโดรน สำหรับการตรวจจับเบื้องต้น (smoke blur/texture detection) และ cloud processing สำหรับการประมวลผลที่ต้องการพลังคอมพิวต์สูงและการ fuse ข้ามแหล่งข้อมูล
Model inference: batch vs streaming — ระบบจะทำงานควบคู่ทั้งแบบ streaming inference และ batch inference:
- Streaming inference ใช้กับข้อมูลโดรนและไทม์ซีรีส์ความถี่สูง (real‑time/near‑real‑time) โดยโมเดล Spatio‑Temporal Transformer แบบลีนที่รันบน edge/คลาวด์จะทำงานแบบ sliding window (ตัวอย่างเช่น window ขนาด 30–120 วินาที ซ้อนกัน 50%) เพื่อจับการเปลี่ยนแปลงของควันแบบไดนามิกและให้ผลตอบสนองรวดเร็ว — เป้าหมาย latency: detection-to-alert ภายใน 2–3 นาที เมื่อได้รับภาพโดรน
- Batch inference ใช้สำหรับชุดข้อมูลดาวเทียมย้อนหลังหรือภาพความละเอียดต่ำที่มาถี่น้อย โดยทำการประมวลผลแบบเป็นรอบ (เช่น ทุก 10–60 นาที) เพื่อค้นหารูปแบบความร้อนและความเปลี่ยนแปลงทางสเปกตรัมที่บ่งชี้ไฟป่า — สำหรับกรณีดาวเทียมระบบตั้งเป้าว่าจะสามารถออก alert เริ่มต้นและ tasking โดรนได้ภายใน 10–15 นาที ขึ้นกับความถี่การส่งข้อมูล
Fusion strategy: early vs late vs hybrid — การรวมข้อมูลเชิงพื้นที่และเวลาเป็นหัวใจของระบบ:
- Early fusion: นำภาพดาวเทียมและเฟรมโดรน (หลัง geo‑referencing) มารวมเป็น tensor เดียวและป้อนให้กับ Spatio‑Temporal Transformer เพื่อให้โมเดลเรียนรู้ความสัมพันธ์ข้ามสเกลตั้งแต่ต้น เหมาะกับเหตุการณ์ที่ต้องการการตัดสินใจจากบริบทหลายแหล่งพร้อมกัน
- Late fusion: ให้โมเดลเฉพาะของแต่ละแหล่ง (ดาวเทียม/โดรน/เซนเซอร์ความร้อน) ทำการคาดการณ์แยก จากนั้นรวมผลลัพธ์ด้วย ensemble หรือคะแนนน้ำหนัก แบบนี้จะเสถียรและง่ายต่อการอธิบายผล
- Hybrid fusion: ระบบนำนโยบายผสม คือใช้ early fusion เมื่อทั้งสองแหล่งมีข้อมูลสอดคล้องกัน และ fallback เป็น late fusion เมื่อแหล่งหนึ่งมีความไม่แน่นอนสูง ซึ่งช่วยลด false alarms และเพิ่มความไวในการตรวจจับ
Anomaly detection และ confidence scoring — หลังการ inference จะมีโมดูลวิเคราะห์ความผิดปกติและคำนวณความเชื่อมั่น (confidence) โดยใช้เทคนิคผสม ได้แก่ residual‑based change detection, probabilistic calibration (Platt scaling/temperature scaling), และการวัด uncertainty จาก Monte Carlo dropout หรือ model ensembles ค่าคะแนนจะถูกแมปเป็นระดับความรุนแรง (low/medium/high) และคำนึงถึงปัจจัยเสริม เช่นฉากหลัง (background thermal noise), สภาพอากาศ และการตรวจสอบด้วยภาพหลายแหล่ง ตัวอย่าง: ถ้า Spatio‑Temporal Transformer ให้คะแนนความน่าจะเป็นควัน 0.92 และโดรนยืนยันด้วยภาพจริง คะแนนความเชื่อมั่นรวมจะเป็น >0.98 ซึ่งจะถูกตีความเป็น alert ระดับสูง
ระบบแจ้งเตือนและ integration กับหน่วยดับเพลิง — โมดูลแจ้งเตือนออกแบบให้เป็นมาตรฐานและเชื่อมต่อได้ง่ายกับระบบต่าง ๆ:
- ช่องทางส่งออก: RESTful API/Webhook สำหรับระบบจัดการเหตุฉุกเฉิน, SMS gateway สำหรับการแจ้งเตือนด่วน, push notification ให้แอป field team และข้อความผ่านแพลตฟอร์มแผนที่ (WMS/WFS หรือ tile map link)
- Alert routing: ระบบจะทำการจัดลำดับและ routing ตาม geo‑fence และ jurisdiction — แจ้งหน่วยดับเพลิงที่อยู่ภายในรัศมีหรือเขตที่รับผิดชอบโดยอัตโนมัติ พร้อมแนบพิกัดแบบพิกัดภูมิศาสตร์, รูปภาพตัวอย่าง, confidence score และคำแนะนำเบื้องต้น
- Geo‑fenced notifications: สามารถตั้งค่าโซนสำคัญ (เช่น เขตอุทยาน, หมู่บ้าน, เส้นทางคมนาคม) เมื่อตรวจพบเหตุในโซนเหล่านี้ระบบจะเพิ่มความเร่งด่วนและขยายการแจ้งเตือนไปยังหน่วยงานที่เกี่ยวข้องโดยอัตโนมัติ
- Integration กับ CAD/dispatch systems: ผ่านมาตรฐานเช่น JSON payload, CAP (Common Alerting Protocol) หรือ Webhooks เพื่อให้การส่งต่อเป็นไปอย่างราบรื่น และรองรับ acknowledgement/dispatch feedback เพื่อปิดวงจรการตรวจจับ
ประเด็นสำคัญทางสถาปัตยกรรมที่องค์กรต้องคำนึงถึงคือการบาลานซ์ระหว่าง edge processing บนโดรน (ลด latency และแบนด์วิธ) กับ cloud processing สำหรับการ fuse ข้อมูลจำนวนมากและเก็บประวัติแบบ long‑term เช่น การฝึกสอน/retraining ของ Spatio‑Temporal Transformer ระบบยังต้องรองรับการปรับขนาด (auto‑scaling), การเข้ารหัสการสื่อสาร, และนโยบายสำรองข้อมูลเพื่อให้สามารถปฏิบัติการได้ต่อเนื่องในเหตุการณ์ฉุกเฉิน
สรุป: พายพ์ไลน์นี้ใช้แนวทางมัลติเลเยอร์ทั้งทางเทคนิคและการปฏิบัติการ เพื่อให้การตรวจจับควันก่อนเปลวไฟมีความเร็วและความน่าเชื่อถือสูงสุด โดยการผสมผสาน Spatio‑Temporal Transformer กับกลยุทธ์ fusion หลายระดับ การคัดกรองที่ edge และระบบแจ้งเตือนที่ผสานกับหน่วยดับเพลิงเชิงภูมิศาสตร์ ทำให้เป้าหมายในการลดพื้นที่เสียหายเป็นไปได้อย่างมีนัยสำคัญในระดับปฏิบัติการจริง
การประเมินผล: เมตริก ตัวอย่างสถิติ และผลการทดลอง (pilot)
เมตริกหลักในการประเมินคุณภาพระบบ
การประเมินระบบเฝ้าระวังไฟป่าที่ผสมผสานข้อมูลดาวเทียมและโดรนต้องวัดทั้งคุณภาพการตรวจจับและความรวดเร็วของการแจ้งเตือน โดยเมตริกที่สำคัญควรรวมถึง:
- Precision (ความแม่นยำ) — สัดส่วนของการแจ้งเตือนที่เป็นเหตุการณ์จริงต่อจำนวนการแจ้งเตือนทั้งหมด (TP / (TP + FP))
- Recall / Sensitivity (การดึงตัวอย่าง) — สัดส่วนของเหตุการณ์จริงที่ระบบสามารถตรวจจับได้ (TP / (TP + FN))
- F1-score — ค่าเฉลี่ยฮาร์มอนิกระหว่าง precision และ recall เพื่อประเมินสมดุลของทั้งสองมิติ
- False alarm rate (อัตราสูญเสียปลอม) — จำนวนการแจ้งเตือนเท็จต่อหน่วยพื้นที่หรือเวลาที่กำหนด (เช่น false positives ต่อ km2 ต่อวัน หรือ false alarms ต่อ 100 การแจ้งเตือน)
- Time-to-detect (ความเร็วในการตรวจจับ) — เวลาตั้งแต่เกิดควัน/ไฟจริงจนถึงเวลาที่ระบบแจ้งเตือน (วัดเป็น median, IQR, และเปอร์เซ็นไทล์สูงสุด เพื่อจับการกระจายของค่า)
- Area-reduction (การลดพื้นที่เสียหาย) — เปอร์เซ็นต์การลดพื้นที่ที่ถูกทำลายเมื่อใช้ระบบใหม่เทียบกับ baseline (เช่น การสอดส่องภาคพื้นหรือการแจ้งผ่านสาธารณะ)
กรอบการทดสอบแบบ pilot
การตั้งค่า pilot ควรกำหนดเป็นโครงการทดลองที่สามารถวัดผลเชิงเปรียบเทียบได้ โดยขั้นตอนหลักได้แก่ การเลือกพื้นที่ทดสอบ (รวมทั้งพื้นที่เสี่ยงสูงและพื้นที่ควบคุม), กำหนดช่วงเวลาและสภาพอากาศตัวแทน, การตั้งค่า baseline ของวิธีการเดิม (เช่น การลาดตระเวนภาคพื้น, สายด่วนแจ้งเหตุ, หรือกล้องตรวจจับพื้นฐาน) และการบันทึกเหตุการณ์ทั้งหมดอย่างเป็นระบบ
รายละเอียดการออกแบบทดสอบแนะนำให้รวม:
- นิยามเหตุการณ์ (event) ชัดเจน เช่น เกณฑ์ควันที่มองเห็นได้จากโดรน/ดาวเทียมหรือการวิเคราะห์ความร้อน
- การสุ่มหรือเลือกไซต์ทดสอบอย่างมีตัวแทน (urban-wildland interface, ป่าสงวน, ที่ราบ) เพื่อให้ผลสามารถทั่วไปได้
- กำหนด windows สำหรับการวัด time-to-detect และ window สำหรับการนับพื้นที่เสียหาย (เช่น 24–72 ชั่วโมงหลังการตรวจจับ)
- การเปรียบเทียบกับวิธีการเดิมแบบคู่ขนาน (parallel baseline) — บันทึกเวลาที่หน่วยดับเพลิงได้รับแจ้งจากช่องทางเดิมและเวลาที่ระบบใหม่ส่งสัญญาณ
- เกณฑ์ความสำเร็จและการวิเคราะห์เชิงสถิติ เช่น การทดสอบความแตกต่างของ median ด้วย Mann–Whitney U หรือการคำนวณ confidence interval ของอัตราการลดพื้นที่
ตัวอย่างผลการทดสอบ (ผลภายใน / ตัวอย่าง)
จากการทดสอบเชิงสาธิตและผลทดสอบภายในของสตาร์ทอัพ (ตัวอย่างภายในโครงการ pilot) พบผลลัพธ์ที่สรุปได้ดังนี้:
- Median time-to-detect: อยู่ในช่วงประมาณ 2–4 นาที เมื่อเทียบกับวิธีการเดิม (ลาดตระเวนภาคพื้นหรือการแจ้งผ่านสาธารณะ) ที่มี median time-to-detect ประมาณ 30–180 นาที ในการทดสอบเดียวกัน
- Precision / Recall / F1 (ตัวอย่างภายใน): ตัวอย่างผลภายในรายงานค่า precision ประมาณ 0.82–0.92, recall 0.85–0.95 และ F1-score 0.83–0.93 ขึ้นกับเงื่อนไขพื้นที่และช่วงเวลาทดสอบ (ค่าช่วงนี้เป็นตัวอย่างภายใน และอาจแตกต่างในการนำไปใช้จริง)
- False alarm rate: อยู่ในระดับต่ำถึงปานกลาง ตัวอย่างภายในรายงาน ~0.05–0.15 false positives ต่อ km2 ต่อวัน หรือประมาณ 5–15 false alarms ต่อ 100 การแจ้งเตือน ขึ้นอยู่กับเกณฑ์การตัดและสภาพแวดล้อม
- Area-reduction: ในการทดสอบเชิงสาธิตระบบช่วยลดพื้นที่เสียหายเฉลี่ยได้ประมาณ 60–80% เมื่อเทียบกับกรณีที่พึ่งพาการลาดตระเวนพื้นดินหรือการแจ้งจากประชาชนเพียงอย่างเดียว (ตัวอย่างภายใน/สาธิต)
นอกเหนือจากค่ากลางเหล่านี้ การวิเคราะห์เหตุการณ์รายกรณีพบว่าในหลายกรณีการแจ้งภายใน 2–4 นาทีทำให้หน่วยงานดับเพลิงสามารถเข้าไปควบคุมเพลิงก่อนที่เปลวจะขยายวงกว้าง ซึ่งเป็นปัจจัยหลักในการลดพื้นที่เสียหาย ซึ่งผลลัพธ์ดังกล่าวผ่านการวัดเป็นเปอร์เซ็นต์พื้นที่ที่ลดลงและการเปรียบเทียบเวลาแจ้งก่อน/หลังการติดตั้งระบบ
การสร้าง ground truth สำหรับควันและไฟ
การได้มาซึ่ง ground truth ที่เชื่อถือได้เป็นหัวใจของการประเมิน คุณภาพของ label จะกำหนดความถูกต้องของเมตริกทั้งหมด โดยแนวปฏิบัติที่แนะนำประกอบด้วย:
- Manual annotation — ผู้เชี่ยวชาญทำการระบุควันและขอบเขตไฟจากภาพความละเอียดสูงของโดรนและภาพออปติคัล/เทอร์มอล โดยระบุเวลาที่ชัดเจนของการเริ่มและสิ้นสุดเหตุการณ์
- Post-event satellite validation — ใช้ข้อมูลดาวเทียมความละเอียดกลาง/ต่ำ (เช่น VIIRS, MODIS, Sentinel-2) ทำ validation หลังเหตุการณ์เพื่อยืนยันขอบเขตการเผาไหม้และร่องรอยการไหม้ (burn scar) ในระดับพื้นที่ใหญ่
- Cross-source corroboration — ผสานการยืนยันจากแหล่งอื่น เช่น บันทึกหน่วยดับเพลิง, ภาพจากกล้องติดตั้งบนพื้น, สัญญาณความร้อนจากเซ็นเซอร์พื้นดิน และรายงานชุมชน เพื่อสร้าง consensus label
- Timestamp alignment และ event linking — จัดการเวลาจากหลายแหล่งให้เป็นมาตรฐานเดียว (UTC/local) เพื่อคำนวณ time-to-detect ที่เที่ยงตรง และเชื่อมโยงการตรวจจับของระบบกับเหตุการณ์จริงอย่างเป็นระบบ
- Quality control — ใช้กระบวนการ double-blind annotation และการตรวจสอบความสอดคล้องระหว่าง annotator (inter-annotator agreement) รวมถึงการสุ่มตรวจสอบเพื่อคำนวณความไม่แน่นอนของ ground truth
โดยสรุป การประเมินระบบต้องวัดทั้งความแม่นยำและความเร็ว รวมทั้งทดสอบในสภาพแวดล้อมจริงผ่าน pilot ที่ออกแบบมาอย่างเป็นระบบ ผลทดสอบภายในชี้ให้เห็นว่าการใช้ Spatio‑Temporal Transformer ผสานข้อมูลดาวเทียมและโดรนสามารถลดเวลาแจ้งเตือนลงเป็นนาทีและลดพื้นที่เสียหายได้อย่างมีนัยสำคัญเมื่อเทียบกับวิธีการดั้งเดิม แต่ต้องย้ำว่าค่าตัวอย่างที่นำเสนอเป็นผลภายใน/สาธิตและจำเป็นต้องผ่านการทดสอบภาคสนามในวงกว้างเพื่อยืนยันผลเชิงสถิติและความทั่วไปของระบบ
การปฏิบัติการและการแจ้งเตือน: การรวมระบบเข้ากับหน่วยดับเพลิง
การปฏิบัติการและการแจ้งเตือน: การรวมระบบเข้ากับหน่วยดับเพลิง
การผสานระบบเฝ้าระวังไฟป่าแบบผสมดาวเทียม‑โดรนเข้ากับการปฏิบัติการของหน่วยดับเพลิงต้องอาศัยกรอบการทำงานเชิงปฏิบัติการที่ชัดเจน ตั้งแต่โปรโตคอลการแจ้งเตือน (alerting protocol) ไปจนถึงมาตรการด้านความปลอดภัยของข้อมูล ระบบที่ดีต้องรองรับระดับความสำคัญ (priority levels) และเกณฑ์ความมั่นใจ (confidence thresholds) ที่ออกแบบมาเพื่อลด false alarms ซึ่งเป็นสาเหตุสำคัญของภาระงานที่ไม่จำเป็น ตัวอย่างการปฏิบัติที่แนะนำคือการกำหนดระดับแจ้งเตือนเป็น 3 ระดับ (Informational / Watch / Active) พร้อมกับเกณฑ์ความมั่นใจเชิงตัวเลขและการตอบสนองที่สัมพันธ์กัน เพื่อให้การแจ้งเตือนมีความสอดคล้องกับทรัพยากรในพื้นที่และความเสี่ยงเชิงภูมิศาสตร์
โปรโตคอลการแจ้งเตือนและ confidence thresholds — ระบบควรกำหนดค่าเริ่มต้นของความเชื่อมั่น (confidence) เพื่อสมดุลระหว่างการจับเหตุการณ์เร็วที่สุดกับการลด false positives เช่น:
- Informational (ความเชื่อมั่น 0.40–0.60) — แจ้งเตือนภายในระบบภายในหน่วยงานและบันทึกเป็นเหตุการณ์ติดตาม เหมาะสำหรับการตรวจสอบด้วยคนก่อนสั่งปฏิบัติการภาคสนาม
- Watch (ความเชื่อมั่น 0.60–0.80) — แจ้งเตือนทีมเฝ้าระวังและจัดคิว tasking โดรนอัตโนมัติ (recon fly-by) เพื่อยืนยันภาพ/เทอร์มอลก่อนส่งทีมลงพื้นที่
- Active (ความเชื่อมั่น > 0.80) — ปลุกระบบ dispatch ส่งทีมดับเพลิงแจ้งทางช่องทางฉุกเฉิน (radio/SMS/push) พร้อมสั่ง tasking โดรนสแกนแบบต่อเนื่องและไลฟ์สตรีมเทอร์มอลทันที
การตั้งค่าเกณฑ์เหล่านี้สามารถปรับได้ตามเขตภูมิศาสตร์ ช่วงฤดูกาล และผลวิเคราะห์ย้อนหลัง (historical ROC/precision-recall) เพื่อรักษาอัตรา false alarm ให้ต่ำกว่าเกณฑ์ปฏิบัติการ เช่น false alarm rate ≤ 5–10% ในพื้นที่ที่มีการใช้งานหนาแน่น
UI/UX สำหรับหน่วยดับเพลิง: มุมมองแผนที่และลำดับเหตุการณ์ — อินเทอร์เฟสสำหรับผู้ปฏิบัติงานต้องออกแบบให้รับข้อมูลสำคัญได้ทันทีและตัดสินใจได้รวดเร็ว โดยฟีเจอร์หลักควรรวมถึง:
- มุมมองแผนที่แบบโต้ตอบ (interactive map) ที่แสดงเลเยอร์ของข้อมูล: จุดตรวจดาวเทียม, รัศมีความไม่แน่นอน, ตำแหน่งโดรนและเส้นทางบิน, พื้นที่เสี่ยงตามชั้นเชื้อเพลิง
- ลำดับเหตุการณ์ (event timeline) แสดงการตรวจจับแบบ time-stamped, ที่มา (satellite/drone), ค่า confidence, การกระทำที่ถูกสั่ง (e.g., drone tasked, unit dispatched) และสถานะปัจจุบัน
- media attachments: ภาพถ่ายความละเอียดสูงจากโดรน, สตรีมวิดีโอ/thermal overlay, snapshots ที่มาร์กบริเวณควัน/เปลวไฟ เพื่อประกอบการตัดสินใจแบบภาพรวมและแบบละเอียด
- ปุ่มการกระทำด่วน (quick actions): acknowledge, escalate, mark false positive, task additional drone, request air support
- แอปมือถือแบบ Offline-first สำหรับหัวหน้าหน่วย ณ พื้นที่ห่างไกล พร้อมระบบแผนที่ภายในที่ยังใช้งานได้เมื่อสัญญาณเครือข่ายไม่เสถียร
เวิร์กโฟลว์การตอบสนองและ tasking โดรนต่อเนื่อง — เวิร์กโฟลว์มาตรฐานควรชัดเจนและอัตโนมัติในระดับที่เหมาะสม ตัวอย่างการไหลของงาน (workflow) แบบย่อ:
- ระบบตรวจจับควัน (Spatio‑Temporal Transformer) ส่งเหตุการณ์พร้อมค่า confidence → ระบบตัดสินใช้เกณฑ์ที่ตั้งไว้
- หากเป็นระดับ Watch → สั่งโดรนสำรวจรอบแรกภายใน 3–7 นาที ขึ้นอยู่กับระยะทาง และส่งภาพ/thermal มายังแผนที่
- หากยืนยันเป็น Active → ระบบแจ้ง dispatch ส่งทีมดับเพลิง ตามแผนการเดินทางที่คำนวณเวลาไปถึงจุดเกิดเหตุ (ETA) พร้อมสั่ง tasking โดรนแบบต่อเนื่อง (revisit cadence: ทุก 2–5 นาที) เพื่ออัปเดตตำแหน่งเปลวไฟและพยากรณ์การลุกลาม
- ระบบเก็บบันทึกการตอบสนองทั้งหมด (dispatch log) และทำ post‑incident report อัตโนมัติ เพื่อการประเมินผลและปรับปรุง SOP
การฝึกอบรมและการซ้อม (SOP evaluation) — การนำระบบไปใช้จริงต้องมีการฝึกอบรมและซ้อมร่วมกับหน่วยงานท้องถิ่นอย่างสม่ำเสมอ รายการที่ควรบรรจุในแผนฝึกอบรมได้แก่:
- การใช้งานอินเทอร์เฟสสำหรับผู้ควบคุม (incident controller) และผู้บังคับการภาคสนาม (field commander)
- การตัดสินใจตามระดับความเชื่อมั่น รวมถึงการจัดการ false alarms และการยืนยันเหตุด้วยสื่อจากโดรน
- การซ้อมสถานการณ์จำลอง (tabletop + live drills) โดยรวมการแจ้งเตือนจากระบบ การ tasking โดรน การ dispatch ทีม และการสื่อสารข้ามหน่วยงาน
- การประเมิน KPI หลังการซ้อม เช่น Mean Time To Detect (MTTD), Mean Time To Dispatch (MTTDsp), และ พื้นที่เสียหายลดลงเป็นร้อยละ (%) เพื่อปรับ SOP ให้เป็นมาตรฐานร่วมกัน
นโยบายด้านความปลอดภัยของข้อมูล — ระบบต้องปกป้องข้อมูลภาพและตำแหน่งอย่างเข้มงวดเพื่อความปลอดภัยของปฏิบัติการและความเป็นส่วนตัวของประชาชน แนวทางสำคัญได้แก่:
- การเข้ารหัสเมื่อส่งและเก็บข้อมูล (TLS 1.2+ สำหรับการสื่อสาร, AES‑256 สำหรับการเก็บข้อมูล) และระบบจัดการคีย์ที่มีความปลอดภัย
- การควบคุมการเข้าถึงแบบบทบาท (Role‑Based Access Control) พร้อมสิทธิ์ละเอียดระดับเลเยอร์ (map layers, raw media, dispatch logs)
- การเก็บบันทึกการเข้าถึง (audit logs) และระบบแจ้งเตือนกรณีเข้าถึงข้อมูลผิดปกติ
- นโยบายการเก็บรักษาข้อมูล (data retention) ที่ชัดเจน เช่น เก็บสตรีมวิดีโอเต็มความละเอียด 30–90 วัน โดยสรุปเหตุการณ์สำคัญเก็บใน archive นานขึ้นตามข้อกำหนดทางกฎหมาย
- การมินิไมซ์ข้อมูลส่วนบุคคล (PII) โดยไม่เก็บข้อมูลที่ไม่จำเป็นและใช้เทคนิคการเบลอ (redaction) เมื่อแชร์ไฟล์สู่ภายนอก
โดยสรุป การรวมระบบเฝ้าระวังไฟป่าแบบดาวเทียม‑โดรนเข้ากับหน่วยดับเพลิงต้องวางมาตรการทางเทคนิคและการปฏิบัติการร่วมกัน ตั้งแต่การกำหนด threshold ที่สมดุล การออกแบบ UI เพื่อการตัดสินใจที่รวดเร็ว เวิร์กโฟลว์ tasking และ dispatch ที่ชัดเจน การฝึกอบรมร่วมกับหน่วยงานท้องถิ่น และนโยบายความปลอดภัยของข้อมูลที่เข้มงวด การปฏิบัติตามหลักการเหล่านี้จะช่วยให้การแจ้งเตือนถึงหน่วยดับเพลิงภายในนาทีแรกมีประสิทธิภาพ ลดพื้นที่เสียหายและเพิ่มความปลอดภัยของชุมชนได้อย่างมีนัยสำคัญ
ความท้าทาย เชิงเทคนิคและนโยบาย พร้อมแนวทางพัฒนาในอนาคต
ความท้าทายเชิงเทคนิคหลักและแนวทางลดความผิดพลาด
ระบบเฝ้าระวังไฟป่าที่ผสมผสานดาวเทียมและโดรนโดยอาศัย Spatio‑Temporal Transformer เผชิญกับข้อจำกัดเชิงเทคนิคหลายด้าน ได้แก่ การบังจากเมฆและสภาพอากาศที่เปลี่ยนแปลงเร็วซึ่งลดความน่าเชื่อถือของภาพแสงที่มองเห็นได้ (optical), การเกิด false positives จากเถ้าควัน ฝุ่นควันจากกิจกรรมการเกษตร หรือไอน้ำที่มีลักษณะคล้ายควัน และความไม่สม่ำเสมอของข้อมูลข้ามโดเมน (domain shift) ระหว่างภาพจากดาวเทียมความละเอียดต่ำ ภาพโดรนความละเอียดสูง และเซนเซอร์ความร้อน
แนวทางเชิงเทคนิคที่แนะนำเพื่อบรรเทาปัญหาเหล่านี้ได้แก่การใช้ multimodal fusion ระหว่างข้อมูล optical, SAR (Synthetic Aperture Radar) ที่ทะลุเมฆได้, และ thermal/IR จากโดรนหรือดาวเทียมความร้อน การผสานข้อมูลเชิงเวลา (temporal smoothing) กับโมเดล Spatio‑Temporal Transformer จะช่วยแยกสัญญาณควันชั่วคราวจากการลุกเป็นเปลวไฟจริง การนำระบบคาดความไม่แน่นอน (uncertainty estimation) และการปรับเกณฑ์ความเชื่อมั่น (confidence thresholding) ช่วยลดการแจ้งเตือนผิดพลาดก่อนเรียกหน่วยดับเพลิง
- ใช้ SAR + thermal เพื่อลดผลกระทบจากเมฆและแสงตอนกลางคืน
- ฝึกด้วยชุดข้อมูลผสมที่มีเหตุการณ์จริงและเหตุการณ์จำลอง (simulated smoke/dust) เพื่อลด domain shift
- นำ ensemble models และ calibration ของความเชื่อมั่นมาใช้ เพื่อลด false positives ได้เป็นตัวเลขเชิงปริมาณ
- ติดตั้งระบบยืนยันสถานะ (verification pipeline) ด้วยโดรนตรวจสอบภาคพื้นในพื้นที่เสี่ยงก่อนสั่งเคลื่อนย้ายทรัพยากรขนาดใหญ่
ประเด็นการปฏิบัติการ: ต้นทุน การบำรุงรักษา และการสเกล
การนำระบบไปใช้งานเชิงปฏิบัติการในระดับภูมิภาคและระดับประเทศเจอกับต้นทุนด้านฮาร์ดแวร์ (ดาวเทียมเช่าใช้/ซื้อภาพ, โดรน, เซนเซอร์ความร้อน), ค่าเชื่อมต่อข้อมูลความถี่สูง, ค่าเซิร์ฟเวอร์ และค่าแรงบุคลากรสำหรับการบำรุงรักษาและการตอบสนองฉุกเฉิน ในการทดลองนำร่อง หลายสตาร์ทอัพพบว่าค่าใช้จ่ายต่อพื้นที่ครอบคลุมสามารถสูงขึ้นเมื่อรวมค่าเปลี่ยนแบตเตอรี่โดรน, ค่าบำรุงรักษาเซนเซอร์ และค่า data egress จากผู้ให้บริการดาวเทียม
แนวทางลดต้นทุนและเพิ่มความทนทานเชิงปฏิบัติการ ได้แก่การออกแบบสถาปัตยกรรมแบบ hybrid edge-cloud เพื่อลดการส่งข้อมูลดิบไปยังคลาวด์โดยให้การตัดสินใจเบื้องต้น (edge inference) บนโดรนหรือสถานีภาคพื้น การใช้เทคนิค model compression (quantization, pruning) ช่วยลดการใช้พลังงานและฮาร์ดแวร์ รวมถึงการลงทุนในโซลูชันพลังงานทดแทนสำหรับสถานีภาคพื้น เช่น แผงโซลาร์และแบตเตอรี่สำรองเพื่อยืดเวลาการใช้งานในพื้นที่ห่างไกล
- วางแผนบำรุงรักษาเชิงคาดการณ์ (predictive maintenance) เพื่อลดเวลาหยุดทำงานและต้นทุนซ่อมฉุกเฉิน
- ใช้โมเดลบน edge และอัพเดตด้วย delta updates เพื่อลด bandwidth และค่าใช้จ่ายการสื่อสาร
- เริ่มสเกลแบบเฟสต่อเฟส (priority-by-risk) โดยเริ่มจากพื้นที่ที่มีความเสี่ยงสูงที่สุดเพื่อลดต้นทุนเริ่มต้น
นโยบาย กฎหมาย และความเป็นส่วนตัว พร้อมแนวทางการปฏิบัติ
การใช้โดรนและภาพถ่ายทางอากาศก่อให้เกิดคำถามด้านกฎหมายและความเป็นส่วนตัว เช่น การบันทึกภาพประชาชนโดยไม่ได้รับความยินยอม ข้อจำกัดเรื่องเขตปลอดบิน (no-fly zones) และกรอบการใช้ข้อมูลจากดาวเทียมเชิงพาณิชย์ กรอบนโยบายที่ชัดเจนจำเป็นต้องมีเพื่อป้องกันปัญหาทางกฎหมายและสร้างความไว้วางใจกับชุมชน
ข้อเสนอแนวทางเชิงนโยบายรวมถึงการใช้เทคนิคเพื่อรักษาความเป็นส่วนตัว เช่น federated learning สำหรับฝึกโมเดลโดยไม่ต้องส่งข้อมูลภาพดิบไปยังศูนย์กลาง, การทำ anonymization/blur ใบหน้าและยานพาหนะโดยอัตโนมัติ, การจัดทำมาตรฐานการเข้ารหัสข้อมูลขณะส่ง และการกำหนด SOP ร่วมกับหน่วยงานภาครัฐ (เช่น กรมป้องกันและบรรเทาสาธารณภัย, กรมควบคุมมลพิษ และหน่วยงานการบินพลเรือน)
- จัดตั้ง regulatory sandbox สำหรับทดสอบการใช้โดรน/AI ในพื้นที่ควบคุม โดยมีภาครัฐร่วมกำกับ
- ข้อกำหนดการเก็บข้อมูลและระยะเวลาเก็บรักษาชัดเจน เพื่อป้องกันการใช้งานข้อมูลเกินวัตถุประสงค์
- บันทึกการเข้าถึงข้อมูลและการตรวจสอบ (audit logs) เพื่อความโปร่งใสและการรับผิด
- ทำ MoU กับหน่วยงานสื่อสารและผู้ให้บริการดาวเทียมเพื่อการเข้าถึงข้อมูลฉุกเฉินด้วยเงื่อนไขพิเศษ
ทิศทางการวิจัยและพัฒนาเพื่อการยกระดับระบบในอนาคต
งานวิจัยที่จำเป็นต่อการยกระดับประสิทธิภาพรวมถึงการพัฒนา attention mechanisms ที่เหมาะกับข้อมูล spatio‑temporal ขนาดใหญ่ เช่น sparse attention และ memory-efficient attention เพื่อให้ Transformer ทำงานบนข้อมูลภาพและซีเควนซ์ยาวได้แบบ realtime นอกจากนี้การพัฒนา domain adaptation และ self-supervised learning จะช่วยให้โมเดลปรับตัวได้ดีกับภูมิศาสตร์และฤดูกาลที่แตกต่างกันของประเทศไทย
หัวข้อวิจัยเชิงปฏิบัติที่แนะนำได้แก่การพัฒนา:
- Improved attention mechanisms ที่ลดความซับซ้อนเชิงคำนวณและรองรับข้อมูลหลายมิติ (optical, SAR, thermal)
- Better domain adaptation และ continual learning เพื่อรองรับการเปลี่ยนแปลงเชิงภูมิสารสนเทศและสภาพแวดล้อม
- Uncertainty-aware models และ explainability เพื่อให้การตัดสินใจสามารถตรวจสอบได้โดยผู้ปฏิบัติการ
- Active learning และ synthetic data generation เพื่อเพิ่มชุดข้อมูลเหตุการณ์ไฟป่าที่มีความหลากหลาย โดยไม่ต้องพึ่งพาการเก็บข้อมูลจากสถานการณ์จริงเพียงอย่างเดียว
การผสมผสานแนวทางเชิงเทคนิคและนโยบายที่กล่าวมาจะช่วยให้ระบบเฝ้าระวังไฟป่าของสตาร์ทอัพไทยสามารถลดอัตราการแจ้งเตือนผิดพลาด เพิ่มความน่าเชื่อถือทางปฏิบัติการ และขยายการให้บริการในระดับชาติอย่างยั่งยืน โดยควรมีตัวชี้วัดชัดเจน เช่น ลดเวลาแฝงการแจ้งเตือนเหลือภายในนาที, ลดพื้นที่เสียหายต่อเหตุการณ์ลงอย่างน้อย 30–60% ในพื้นที่นำร่อง และลดอัตรา false positive ตามเป้าหมายการทดลองนำร่อง
บทสรุป
สตาร์ทอัพไทยได้นำการผสมผสานข้อมูลจากดาวเทียมและโดรนเข้ากับโมเดล Spatio‑Temporal Transformer เพื่อตรวจจับสัญญาณควันเชิงพื้นที่และเวลาที่เกิดขึ้นก่อนการลุกลามเป็นเปลวไฟจริง โดยโมเดลนี้สามารถเรียนรู้ลักษณะการกระจายของควันทั้งในมิติภาพและมิติเวลา ทำให้สามารถแจ้งเตือนหน่วยดับเพลิงได้ภายในไม่กี่นาที แทนที่จะต้องรอการยืนยันจากแหล่งเดียวหรือรอดูการลุกลามแบบเดิม ผลการทดสอบเชิงปฏิบัติการชี้ให้เห็นการลดเวลาในการตอบสนองอย่างมีนัยสำคัญและการจำกัดพื้นที่เสียหายจากไฟป่าได้อย่างชัดเจน จึงช่วยเพิ่มโอกาสในการควบคุมเพลิงได้รวดเร็วและลดผลกระทบต่อทรัพยากรป่าไม้และชุมชนริมป่าได้จริง
อย่างไรก็ตามการนำระบบดังกล่าวไปใช้ในวงกว้างจำเป็นต้องคำนึงทั้งมิติทางเทคนิค การปฏิบัติการ และนโยบายร่วมกัน ทางเทคนิคต้องจัดการเรื่องคุณภาพข้อมูล ความหน่วงของการสื่อสาร ความทนทานต่อสภาพอากาศและการลดผลบวกลวง ในเชิงปฏิบัติการต้องวางแผนการปฏิบัติการของโดรน การจัดการแบตเตอรี่ การบำรุงรักษา การฝึกอบรมบุคลากร และการผสานการแจ้งเตือนกับหน่วยดับเพลิงท้องถิ่น ส่วนมิตินโยบายต้องกำหนดกฎระเบียบการบิน การคุ้มครองข้อมูลส่วนบุคคล การจัดสรรงบประมาณและกรอบความร่วมมือข้ามหน่วยงาน หากมีการทดลองเชิงภาคสนามร่วมกับหน่วยงานดับเพลิง การมีคู่มือปฏิบัติการและกรอบกำกับดูแลที่ชัดเจน ระบบนี้มีศักยภาพจะขยายสู่การบูรณาการกับโมเดลพยากรณ์อากาศและความเสี่ยงเชิงพื้นที่ สร้างเครือข่ายเฝ้าระวังเชิงรุกที่ยั่งยืนและปลอดภัยในอนาคต



