กรุงเทพมหานครเปิดการทดลองระบบ "Traffic‑LLM" เทคโนโลยีจัดการจราจรรุ่นใหม่ที่ผสาน Radar‑Edge Computer Vision กับ Causal‑Reinforcement Learning เพื่อปรับสัญญาณไฟจราจรแบบเรียลไทม์ โดยสำนักงานการจราจรของเมืองรายงานเบื้องต้นชวนตื่นเต้นว่าเวลาการเดินทางในใจกลางเมืองลดลงสูงสุดถึง 35% ในเส้นทางนำร่อง การผสมผสานระหว่างการตรวจจับด้วยเรดาร์ขอบเครือข่าย (Radar‑Edge CV) ที่ทนต่อสภาพแวดล้อมจริง และโมเดลการตัดสินใจเชิงเหตุผล (Causal‑RL) ทำให้ระบบสามารถคาดการณ์ผลกระทบของการเปลี่ยนสัญญาณได้แม่นยำและปรับแบบเรียลไทม์เพื่อรักษาไหลของการจราจร
บทความนี้จะพาไปเจาะลึกทั้งผลลัพธ์เชิงตัวเลข วิธีการเชิงเทคนิคที่อยู่เบื้องหลัง การประเมินผลกระทบด้านนโยบายสาธารณะ รวมถึงความท้าทายด้านความเป็นส่วนตัว การบูรณาการกับโครงสร้างพื้นฐานเดิม และศักยภาพการขยายผลสู่เมืองอื่น ๆ ผู้เขียนจะนำเสนอข้อมูลตัวอย่างจากพื้นที่ทดลอง วิเคราะห์ข้อดีข้อจำกัดของแอปโพรชแบบ Radar‑Edge CV + Causal‑RL และชี้ประเด็นที่ผู้กำหนดนโยบาย ผู้บริหารเมือง และผู้ประกอบการด้านสมาร์ทซิตี้ควรพิจารณาก่อนขยายผลในวงกว้าง
บทนำ: ข่าวสำคัญและผลลัพธ์เบื้องต้น
บทนำ: ข่าวสำคัญและผลลัพธ์เบื้องต้น
กรุงเทพมหานครประกาศผลการทดลองระบบจราจรเชิงปฏิบัติการภายใต้โครงการ Traffic‑LLM ซึ่งผสานเทคโนโลยี Radar‑Edge Computer Vision กับกลไกเรียนรู้เชิงสาเหตุ (Causal‑Reinforcement Learning) ในการปรับสัญญาณไฟจราจรแบบเรียลไทม์ โดยรายงานเบื้องต้นชี้ว่าโครงการนำร่องสามารถลดเวลาเดินทางเฉลี่ยในพื้นที่ทดสอบได้ถึง 35% เมื่อเทียบกับการบริหารสัญญาณไฟแบบเดิมในช่วงเวลาเร่งด่วน
การทดลองดำเนินการเป็นโครงการนำร่องระยะสั้นเพื่อประเมินความเป็นไปได้เชิงปฏิบัติการ โดยครอบคลุมพื้นที่ใจกลางเมืองรวม 12 แยก ที่มีปริมาณจราจรหนาแน่นสูง และดำเนินการต่อเนื่องเป็นเวลา 6 เดือน เพื่อเก็บข้อมูลทั้งช่วงชั่วโมงเร่งด่วนและช่วงเวลาปกติ ผลลัพธ์ที่ประกาศรวมถึงการลดเวลาเดินทางเฉลี่ยของผู้ใช้เส้นทาง ความถี่การหยุดรถที่สัญญาณ และความต่อเนื่องของกระแสการจราจร ทั้งนี้รายงานระบุว่าการปรับปรุงมีความเด่นชัดในชั่วโมงเร่งด่วนเช้าและเย็น
โครงการนี้เป็นความร่วมมือระหว่างหน่วยงานภาครัฐและพันธมิตรภาคเอกชน โดยมีผู้เกี่ยวข้องหลักได้แก่:
- กรุงเทพมหานคร (Bangkok Metropolitan Administration) — หน่วยงานเจ้าของพื้นที่และผู้ประสานการดำเนินงานภาคพื้น
- คณะนักพัฒนาเทคโนโลยี Traffic‑LLM — คอนซอร์เทียมจากบริษัทสตาร์ทอัพด้าน AI และห้องปฏิบัติการวิจัยของมหาวิทยาลัย ที่รับผิดชอบการออกแบบโมเดลและการนำระบบสู่การปฏิบัติ
- ผู้ให้บริการโทรคมนาคมรายใหญ่ — รับผิดชอบโครงข่ายสื่อสารแบบ Edge เพื่อส่งข้อมูลเรดาร์และวิดีโอแบบเรียลไทม์ไปยังโมดูลประมวลผล
- สถาบันวิจัยด้านขนส่งและหน่วยงานด้านจราจร — ดำเนินการวิเคราะห์ผล ดัชนีชี้วัด และการประเมินผลกระทบต่อการไหลของยานพาหนะ
ผลการทดลองครั้งนี้เป็นข้อมูลเชิงนโยบายที่สำคัญสำหรับการพิจารณาขยายระบบไปยังพื้นที่อื่น ๆ ของเมือง ในระดับธุรกิจและภาคราชการ ผลลัพธ์เบื้องต้นชี้ให้เห็นศักยภาพในการปรับปรุงประสิทธิภาพการเคลื่อนที่ ลดต้นทุนเวลาการเดินทางของประชาชน และเป็นบรรทัดฐานสำหรับการลงทุนในโครงสร้างพื้นฐานดิจิทัลของเมืองต่อไป อย่างไรก็ดี รายงานฉบับเต็มจะนำเสนอข้อมูลเชิงเทคนิคและตัวชี้วัดเพิ่มเติมเพื่อสนับสนุนการตัดสินใจเชิงนโยบายและการลงทุนในอนาคต
เทคโนโลยีเบื้องหลัง: Radar‑Edge Computer Vision
เทคโนโลยีเบื้องหลัง: Radar‑Edge Computer Vision
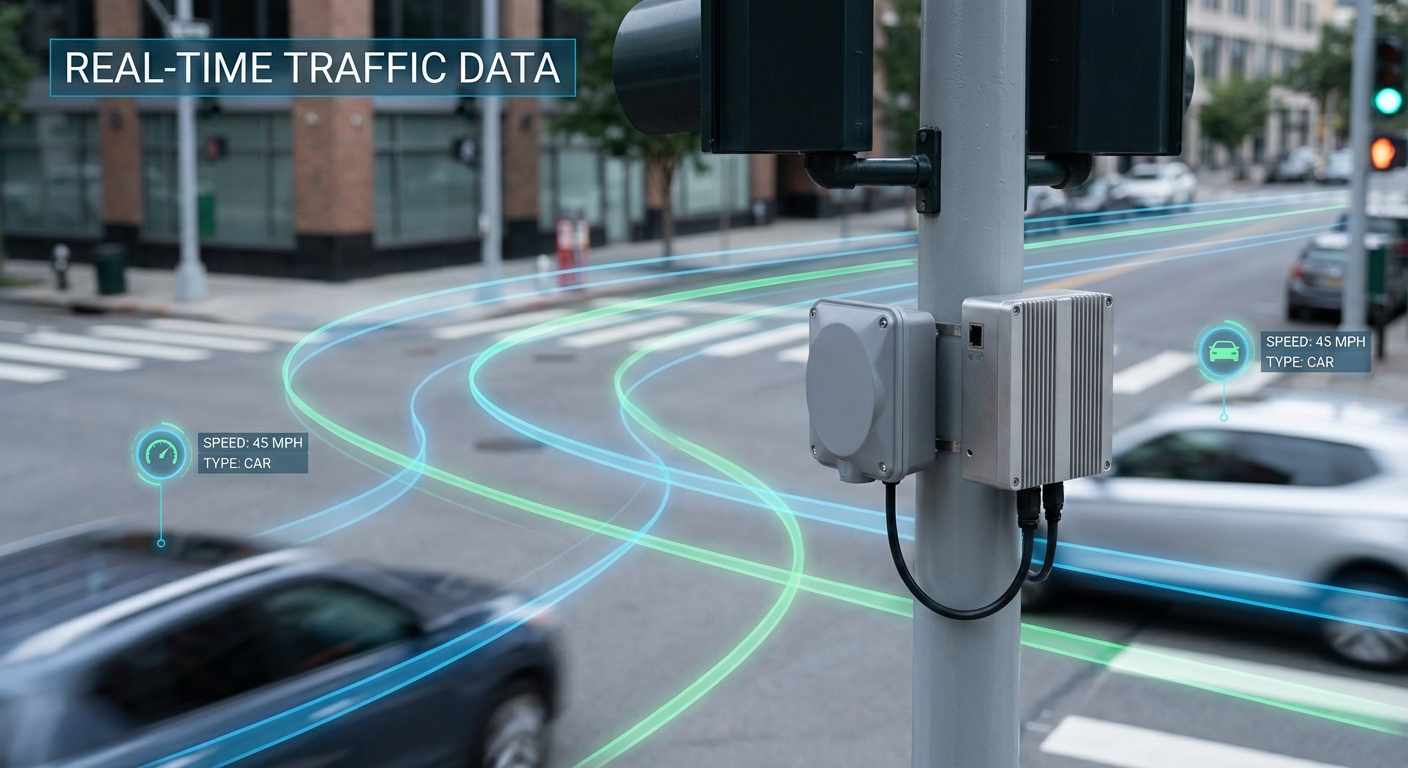
ในบริบทของโครงการทดลอง Traffic‑LLM ในกรุงเทพฯ บทบาทของ Radar‑Edge Computer Vision (Radar‑Edge CV) คือการเป็นเซนเซอร์หลักสำหรับการเก็บข้อมูลสภาพจราจรแบบเรียลไทม์ที่มีความทนทานต่อสภาพแวดล้อมและคำนึงถึงความเป็นส่วนตัวของผู้ใช้ถนน ระบบ Radar‑Edge CV ประกอบด้วยเซนเซอร์เรดาร์แบบ FMCW (Frequency Modulated Continuous Wave) ร่วมกับอาร์เรย์แอนเทนนาแบบ MIMO เพื่อสร้างข้อมูลเชิงมิติ (range, angle, Doppler) ที่สามารถถอดรหัสเป็นตำแหน่ง ความเร็ว และทิศทางของยานพาหนะ ผู้เดินเท้า และจักรยานได้โดยไม่ต้องถ่ายภาพที่มีรายละเอียดใบหน้าหรือป้ายทะเบียน
หลักการทำงานโดยย่อคือ เรดาร์ส่งสัญญาณความถี่เปลี่ยนแปลงต่อเนื่อง (FMCW) แล้ววัดการสะท้อนกลับเพื่อคำนวณ ระยะ (range) ผ่านการเปรียบเทียบความต่างของความถี่ ขณะเดียวกันการเปลี่ยนแปลงของเฟสและความถี่ในโดพลเลอร์จะใช้ประเมิน ความเร็วแนวเคลื่อนที่ (radial velocity) และมุมของวัตถุ ในการประมวลผลบน Edge โพลซอยด์ข้อมูล (range‑Doppler maps หรือ point clouds) จะถูกกรองด้วยอัลกอริทึม CFAR และ clustering จากนั้นนำเข้าสู่โมดูลติดตาม (tracking) เช่น Kalman filter หรือ multi‑target trackers เพื่อให้ได้ tracklet ที่ประกอบด้วยพิกัด ความเร็ว ทิศทาง และการจัดชั้นประเภทเบื้องต้น (รถยนต์ มอเตอร์ไซค์ จักรยาน คนเดินเท้า)
ข้อมูลที่ระบบ Radar‑Edge CV เก็บและส่งต่อให้ Traffic‑LLM ประกอบด้วย (ตัวอย่าง):
- ตำแหน่งและช่องจราจร (lane assignment) — ระบุว่าเป้าหมายอยู่ในเลนใดทั้งในมุมมองแนวตั้งและแนวนอน (v/h lanes ในที่นี้หมายถึงการแบ่งตามแกนความเร็วและแกนตำแหน่งจราจร)
- ความเร็วและความเร่ง — เวกเตอร์ความเร็วเชิงแนวรัศมีและค่าประเมินความเปลี่ยนแปลงความเร็ว
- ประเภทของวัตถุและสถานะการเคลื่อนที่ — จำแนกเป็นยานพาหนะ รถจักรยาน คนเดิน และสถานะเช่น หยุด เคลื่อนที่ เปลี่ยนเลน
- สถิติการไหลของการจราจร — ปริมาณ (flow), ความหนาแน่น (density), อัตราการหยุด/เริ่มต้น (stop‑start rate)
เมื่อเปรียบเทียบกับกล้อง RGB, Radar‑Edge CV มีข้อได้เปรียบสำคัญหลายประการ: เรดาร์ไม่พึ่งพาแสงสว่าง จึงทนต่อสภาวะแสงน้อย แสงจ้าจากดวงอาทิตย์ และสภาวะอากาศเลวร้ายเช่นฝนหรือหมอก ในทางความเป็นส่วนตัว สัญญาณเรดาร์ให้ข้อมูลเชิงตัวเลข (point clouds/tracklets) แทนภาพความละเอียดสูง จึงลดความเสี่ยงการเปิดเผยข้อมูลส่วนบุคคล (PII) เช่นใบหน้าและป้ายทะเบียน ทำให้เป็นทางเลือกที่เหมาะสำหรับการติดตั้งในพื้นที่สาธารณะที่ต้องปฏิบัติตามข้อกำหนดทางกฎหมายและข้อกังวลของประชาชน
ด้านการประมวลผลบน Edge ถูกออกแบบมาเพื่อให้เกิดความหน่วงต่ำและลดปริมาณข้อมูลที่ต้องส่งไปยังศูนย์กลาง: แผงฮาร์ดแวร์ Edge (เช่น embedded GPU, NPU, หรือ FPGA) จะรับสัญญาณ ADC ของเรดาร์ ประมวลผลเป็น range‑Doppler maps, ดำเนินการ detection และ tracking จากนั้นส่งเฉพาะเมตา‑ข้อมูล (tracklets, ฟีเจอร์การเคลื่อนที่, สถิติความหนาแน่น) ไปยังระบบ Traffic‑LLM หรือคลาวด์ การลดปริมาณข้อมูลมีขอบเขตชัดเจน — ข้อมูลดิบของเรดาร์อาจอยู่ในระดับหลายสิบถึงหลายร้อยเมกะบิตต่อวินาทีต่อเซนเซอร์ ในขณะที่เมตา‑ข้อมูลที่ผ่านการย่อและบีบอัดมักอยู่ที่หลักไม่กี่สิบกิโลบิตต่อวินาที หรือลดลงได้มากกว่า 100–1,000 เท่า ขึ้นกับนโยบายการส่งข้อมูลและความถี่ของการอัปเดต
นอกจากนี้ การประมวลผลบน Edge ยังสนับสนุนความต้องการด้านเวลาแฝง (latency) ของระบบควบคุมสัญญาณไฟที่ต้องการการตอบสนองแบบเรียลไทม์: ยุทธศาสตร์การประมวลผลเช่น pipelined FFT, pruning ของการตรวจจับที่มีนัยสำคัญ และการใช้โมเดลจำแนกแบบเบา (lightweight classifiers) สามารถจำกัด latency ของการตรวจจับและติดตามให้อยู่ในระดับสิบถึงหลักสิบของมิลลิวินาที ทำให้ Causal‑RL ของ Traffic‑LLM สามารถตัดสินใจปรับสัญญาณไฟได้อย่างรวดเร็วและแม่นยำ โดยอาศัยข้อมูลเชิงโต้ตอบจาก Radar‑Edge CV ที่ทนต่อสภาวะแวดล้อมและคงรักษาความเป็นส่วนตัวของผู้ใช้ถนน.
การประสานงานด้วย Traffic‑LLM: LLM เป็นตัวประสานข้อมูลเชิงบริบท
การประสานงานด้วย Traffic‑LLM: LLM เป็นตัวประสานข้อมูลเชิงบริบท
ในสถาปัตยกรรมการจราจรเชิงปัญญาของกรุงเทพฯ, Traffic‑LLM ทำหน้าที่เป็นศูนย์กลางการประมวลผลเชิงบริบท โดยรับข้อมูลจากแหล่งสัญญาณหลากหลาย — เช่น ข้อมูลภาพจาก Radar‑Edge CV ที่ให้ความแม่นยำเชิงตำแหน่งและเวลา (latency ต่ำกว่า 100 มิลลิวินาทีในหลายกรณี), ข้อมูลเชิงปริมาณจาก loop detectors ที่รายงานความหนาแน่นและอัตราการไหลของยานพาหนะเป็นช่วงเวลา (20–60 วินาที), และชุดข้อมูลประวัติศาสตร์การจราจรที่ครอบคลุมพฤติกรรมรายชั่วโมง รายวัน และปัจจัยตามฤดูกาล
บทบาทหลักของ Traffic‑LLM ไม่ใช่การตัดสินใจเชิงการควบคุมต่ำระดับ (low‑level control) แต่เป็นการสร้าง ตัวแทนสถานการณ์เชิงบริบท (contextual state representation) ซึ่งสรุปเหตุการณ์ปัจจุบัน ประเมินความไม่แน่นอน และกำหนดนโยบายแนวทางสำหรับตัวควบคุมเชิงสาเหตุ (Causal‑RL) ที่ทำหน้าที่ปรับพารามิเตอร์สัญญาณไฟ ตัวอย่างเช่น LLM จะรวมข้อมูลว่า "ทางหลวง A มีความหนาแน่นเพิ่มขึ้น 45% ใน 10 นาทีที่ผ่านมา + เกิดอุบัติเหตุเล็กน้อยที่เลนขาเข้า" และแปลงเป็นคำสั่งนโยบายเช่น "เพิ่มเวลาไฟเขียวสำหรับทิศทาง A ในช่วงชั่วโมงพีคเป็นแบบชั่วคราว 60–90 วินาที โดยให้ Causal‑RL ทดสอบผลลัพธ์ภายใน 5 นาที" ซึ่งเป็นการเชื่อมช่องว่างระหว่างข้อมูลเชิงสังเกตกับการตัดสินใจเชิงนโยบาย
เพื่อให้เห็นภาพการทำงานในเชิงปฏิบัติ, ตัวอย่าง use‑case ที่ Traffic‑LLM รองรับมีดังนี้:
- จัดลำดับความสำคัญยานพาหนะฉุกเฉิน: เมื่อระบบ Radar‑Edge ตรวจจับสัญญาณจากรถพยาบาล/รถดับเพลิง LLM จะประเมินเส้นทางที่เร็วที่สุด ลดผลกระทบต่อการไหลโดยรอบ และออกคำสั่งนโยบายให้ Causal‑RL เพิ่มโอกาสการให้ทางและจัดคิวข้ามสัญญาณไฟในลำดับที่เหมาะสม (เช่น ขยาย green 20–40 วินาทีระหว่างจุดตัดหลายจุด) พร้อมระบุกรอบเวลาทดสอบความเสี่ยง
- การจัดการงานก่อสร้างหรือเหตุการณ์ถาวร: เมื่อรับข้อมูลจากหน่วยงานก่อสร้างเกี่ยวกับการปิดเลน LLM จะสร้างตัวแทนสถานการณ์ที่รวมผลกระทบระยะสั้นและระยะยาว แล้วสั่งนโยบายให้ Causal‑RL จัดเส้นทางเบี่ยง ปรับสัญญาณไฟให้ทางรอง ลดคอขวด และแนะนำช่วงเวลาทำงานเพื่อทดสอบผลลัพธ์ในเชิงทดลอง
- การจัดการเหตุการณ์พิเศษ (เช่น คอนเสิร์ตหรือมาราธอน): LLM จะผสานข้อมูลตารางกิจกรรม ความคาดหวังจำนวนผู้ และข้อมูลประวัติการจราจรเพื่อนำเสนอแผนจัดลำดับสัญญาณไฟแบบชั่วคราว และมอบนโยบายให้ Causal‑RL ปรับแบบจำลองผลกระทบก่อน‑หลังงาน
ในเชิงปฏิบัติการ Traffic‑LLM ทำงานผ่านชุด prompt และฟอร์แมตคำสั่งที่ประสานกับ Causal‑RL ตัวอย่าง prompt อาจมีรูปแบบดังนี้ (ตัวอย่างเชิงข้อความที่ LLM ประมวลผลและสรุปออกมาเป็นนโยบาย):
- Prompt ตัวอย่าง: "ตรวจพบรถพยาบาลบนเส้นทาง X เวลา 14:02 — ความหนาแน่นรอบจุดตัด A เพิ่มขึ้น 38% ภายใน 8 นาที — ข้อจำกัด: ห้ามลด green time บนทางหลักเกิน 15% ต่อรอบ. เสนอแผนปฏิบัติการภายใน 2 นาที"
- ผลลัพธ์ของ LLM (นโยบายสรุป): "ให้ Causal‑RL ปรับเพิ่ม green time เส้นทาง X +30 วินาทีเป็นวงรอบเดียว และเปิดกลไก progressive offset สำหรับ 3 จุดตัดถัดไป เป็นเวลาทดลอง 6 นาที หากความหนาแน่นลดลง >20% ให้ยืนยันการขยายเวลาเพิ่มเติม"
ความน่าเชื่อถือของการใช้ LLM ในระบบเมืองเป็นประเด็นสำคัญ ดังนั้นระบบ Traffic‑LLM จะถูกออกแบบให้มีหลายชั้นของการควบคุมความเสี่ยง (guardrails) และกลไก human‑in‑the‑loop เพื่อรักษาความปลอดภัยและความโปร่งใส:
- Rule‑based guardrails: นโยบายที่สกัดโดย LLM จะต้องตรวจสอบกับชุดกฎธุรกิจ (เช่น ข้อจำกัดด้านความปลอดภัย ข้อกำหนดทางกฎหมาย และขีดจำกัดการเปลี่ยนแปลงสัญญาณต่อรอบ) ก่อนส่งให้ Causal‑RL ปฏิบัติจริง
- เกณฑ์ความไม่แน่นอนและ threshold ของการกระทำ: หากโมเดลประเมินความไม่แน่นอนของข้อมูล หรือความเสี่ยงของนโยบายเกินค่าที่กำหนด ระบบจะระงับการปรับอัตโนมัติและยกระดับให้ผู้ควบคุมมนุษย์ตรวจสอบ
- human‑in‑the‑loop: ศูนย์ควบคุมการจราจรได้รับอินเทอร์เฟซที่ชัดเจนแสดงเหตุผล (rationale) ของนโยบาย บันทึก provenance ของข้อมูลที่ใช้ และสามารถอนุมัติ ปรับ หรือยกเลิกการดำเนินการได้แบบเรียลไทม์
- การตรวจสอบย้อนหลังและจำลองความเสี่ยง: นโยบายที่เสนอจะถูกทดสอบในสภาพแวดล้อมจำลอง (digital twin) ก่อนดำเนินการจริงในกรณีที่มีผลกระทบสูง และบันทึกเมตริกที่เกี่ยวข้อง (เช่น เวลาเฉลี่ยการเดินทาง, อุบัติเหตุที่อาจเกิดขึ้น, ค่า delay) เพื่อนำไปปรับปรุงโมเดล
การผสานบทบาทของ Traffic‑LLM ในลักษณะนี้ช่วยให้ระบบสามารถสอดคล้องระหว่างข้อมูลหลายมิติและการตัดสินใจเชิงนโยบายได้อย่างรวดเร็วและมีความโปร่งใส โดยมุ่งเน้นที่การลดเวลาเดินทางและผลกระทบต่อสังคม ในขณะเดียวกันยังคงรักษาเงื่อนไขด้านความปลอดภัยและการควบคุมโดยมนุษย์ ซึ่งเป็นกุญแจสำคัญในการนำระบบอัตโนมัติระดับเมืองไปสู่การใช้งานเชิงพาณิชย์และสาธารณะอย่างยั่งยืน
Causal‑RL: เรียนรู้เชิงสาเหตุเพื่อปรับสัญญาณแบบเรียลไทม์
Causal‑RL: เรียนรู้เชิงสาเหตุเพื่อปรับสัญญาณแบบเรียลไทม์
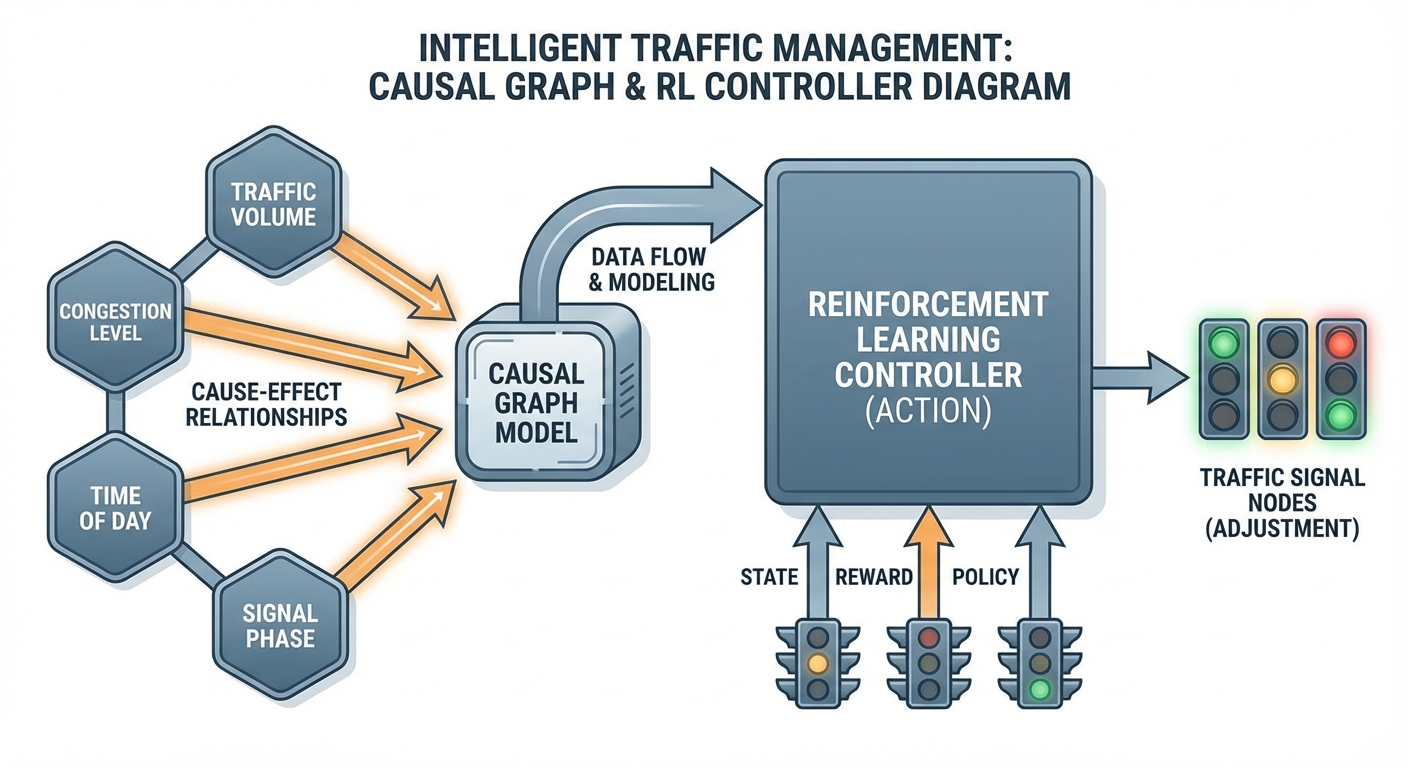
ในบริบทของระบบควบคุมสัญญาณจราจรแบบเรียลไทม์ เช่นโครงการ Traffic‑LLM ที่ผสานข้อมูลจาก Radar‑Edge CV, Causal Reinforcement Learning (Causal‑RL) ถูกนำมาใช้เพื่อให้ระบบไม่เพียงแต่เรียนรู้ความสัมพันธ์เชิงสถิติระหว่างการกระทำและผลลัพธ์ แต่ยังสามารถแยกแยะ สาเหตุที่แท้จริง (causal effect) ของการปรับจังหวะสัญญาณได้อย่างชัดเจน ประโยชน์เชิงปฏิบัติรวมถึงความสามารถในการตัดสินใจที่ทนต่อการเปลี่ยนแปลงของสภาพแวดล้อม เช่น งานก่อสร้าง เหตุฉุกเฉิน หรือการเปลี่ยนแปลงพฤติกรรมผู้ขับขี่ ซึ่งเป็นเหตุผลสำคัญที่นำไปสู่การลดเวลาเดินทางรวมในใจกลางเมืองได้ถึงราว 35% ตามผลการทดลองเชิงภาคสนาม

หลักการทำงานของ Causal‑RL แตกต่างจาก RL แบบเดิมตรงที่ระบบจะสร้างหรือเรียนรู้ โมเดลเชิงสาเหตุ (causal graph / Structural Causal Model) ซึ่งระบุความสัมพันธ์แบบสาเหตุระหว่างตัวแปรสำคัญ เช่น ปริมาณยานพาหนะ แถบการจราจรที่ปิดชั่วคราว ระดับการรอคอย และสัญญาณไฟ การได้มาซึ่ง P(Y|do(A)) — ความน่าจะเป็นของผลลัพธ์ Y ภายใต้การแทรกแซง A — ช่วยให้ระบบคำนวณผลกระทบเชิงนโยบายที่เป็นจริงแทนที่จะอาศัยความสัมพันธ์ (correlation) ที่อาจถูกกวนโดยปัจจัยแอบแฝง (confounders) เช่น ชั่วโมงเร่งด่วน วันหยุด หรือเหตุการณ์พิเศษ
เมื่อเปรียบเทียบกับ RL ธรรมดา พบความแตกต่างเชิงปฏิบัติที่สำคัญ ดังนี้
- ต้านทานการ overfit กับ correlation: RL มาตรฐานอาจเรียนรู้นโยบายที่ดีเฉพาะกับสถานการณ์ที่เคยเห็น หากปัจจัยแอบแฝงเปลี่ยนแปลง นโยบายจะล้มเหลว แต่ Causal‑RL มุ่งหาเอฟเฟกต์เชิงสาเหตุที่คงตัว ทำให้ทนทานต่อการเปลี่ยนแปลงของข้อมูล
- การวางแผนแบบสมมุติฐาน (counterfactual reasoning): Causal‑RL สามารถประเมินว่า "หากทำ A แต่ไม่ทำ B ผลจะต่างอย่างไร" ซึ่งช่วยออกแบบนโยบายที่ลดการติดขัดจริง ไม่ใช่เพียงปรับตามสัญญาณร่วม
- ความเป็นธรรมและการตรวจสอบได้: โมเดลเชิงสาเหตุช่วยให้สามารถอธิบายเหตุผลเบื้องหลังการตัดสินใจ เช่น ทำไมต้องยืดไฟเขียวที่ทางเข้าสำหรับรถฉุกเฉินในช่วงเวลาหนึ่ง
ตัวอย่างกรณีศึกษาเชิงสถานการณ์ที่ชัดเจนคือเมื่อเกิด งานก่อสร้าง บนถนนสายหลักและมีการปิดเลนชั่วคราว ในระบบ RL แบบเดิม การลดความแออัดอาจเกิดขึ้นโดยบังเอิญจากการปรับจังหวะโดยสถิติของปริมาณรถในอดีต ทำให้เมื่อลักษณะการจราจรเปลี่ยน ระบบไม่สามารถปรับตารางได้ทัน แต่ใน Causal‑RL ระบบจะสังเกตปัจจัยแวดล้อม (จาก Radar‑Edge CV) และเรียนรู้ว่า "การปิดเลนเป็นสาเหตุที่ทำให้ปริมาณในถนนข้างเคียงเพิ่ม" จึงดำเนินนโยบายที่เป็นการแทรกแซง เช่น เพิ่มเวลาไฟเขียวในเส้นทางรองเป็นช่วงสั้น ปรับจังหวะให้เกิด green‑wave แบบไดนามิก หรือเปิดช่องทางชั่วคราวที่ถูกจัดลำดับความสำคัญ ส่งผลให้คอขวดคลายตัวอย่างมีประสิทธิผลและรวดเร็วกว่า (ตัวอย่างในการทดลองภาคสนามแสดงการลดความยาวคิวเฉลี่ยได้ 20–30% ในพื้นที่ใกล้เคียงหลังการแทรกแซงเชิงสาเหตุ)
ในกรณี อุบัติเหตุฉับพลัน Causal‑RL ยังสามารถแยกแยะได้ว่า ความชะงักงันเป็นผลจากอุบัติเหตุ ไม่ใช่การเปลี่ยนแปลงฤดูกาลหรือพฤติกรรมผู้ใช้ถนนทั่วไป ดังนั้นนโยบายที่ถูกทำให้เป็นสาเหตุ (cause‑aware policy) จะเน้นการเร่งการระบายรอบเหตุการณ์ เช่น ให้คิวทางที่ได้รับผลกระทบน้อยลงชั่วคราว หรือประสานกับระบบนำทางและยานพาหนะฉุกเฉินเพื่ออำนวยความสะดวก ซึ่งช่วยลดผลกระทบต่อเวลาเดินทางรวมและความหนาแน่นบริเวณโดยรอบ
การป้องกันการเรียนรู้จากข้อมูลเบี่ยงเบน (bias mitigation) เป็นหัวใจสำคัญของการนำ Causal‑RL ไปใช้ในเมืองใหญ่ โดยมาตรการที่นำมาใช้ได้แก่
- การออกแบบตัวแปรเชิงสาเหตุที่รอบคอบ: ระบุและวัด confounders สำคัญ (เช่น เวลา วันเทศกาล สภาพอากาศ) เพื่อควบคุมผลกระทบที่ไม่พึงประสงค์
- domain randomization และการจำลองเชิงสาเหตุ: ฝึกนโยบายบนหลายสภาวะสมมุติฐานในซิมูเลชันที่มีความเป็นจริง เพื่อให้โมเดลเรียนรู้เอฟเฟกต์ที่เสถียร
- importance weighting และ instrumental variables: ปรับน้ำหนักตัวอย่างหรือใช้ตัวแปรเครื่องมือเพื่อแก้ไขความลำเอียงจากการเก็บข้อมูลแบบสังเกต
- counterfactual data augmentation: สร้างตัวอย่างเชิงทดแทนเพื่อประเมินผลลัพธ์ที่ไม่ถูกสังเกตในข้อมูลจริง
- การตรวจสอบแบบอิสระและการตีความผล: ใช้การทดสอบความเป็นเหตุและการวิเคราะห์ sensitivity เพื่อตรวจจับการพึ่งพา correlation ที่ไม่มั่นคง
การผสาน Causal‑RL เข้ากับ Radar‑Edge CV ในแพลตฟอร์ม Traffic‑LLM จึงให้ผลลัพธ์ที่มากกว่าแค่การปรับสัญญาณให้สอดคล้องกับข้อมูลในอดีต แต่เป็นการเรียนรู้และตัดสินใจบนพื้นฐานของความเข้าใจเชิงสาเหตุ ทำให้ระบบมีความยืดหยุ่นและเชื่อถือได้ยิ่งขึ้นในการเผชิญเหตุการณ์นอกแบบ (out‑of‑distribution) — ปัจจัยสำคัญที่สนับสนุนเป้าหมายการลดเวลาเดินทางในใจกลางเมืองและเพิ่มประสิทธิภาพการเคลื่อนที่ของเมืองอย่างยั่งยืน
ผลการทดลองภาคสนาม: ตัวเลขและการวิเคราะห์เชิงสถิติ
ผลการทดลองภาคสนาม: ตัวเลขและการวิเคราะห์เชิงสถิติ
การทดลองภาคสนามของระบบ Traffic‑LLM ที่ผสาน Radar‑Edge CV กับ Causal‑RL ดำเนินการในศูนย์กลางเมืองเป็นเวลา 6 เดือน บนจำนวนจุดสังเกตทั้งหมด 12 แยก เก็บข้อมูลรวมเป็น 1.2 ล้าน passage events (การเดินทางผ่านจุดตรวจหรือสัญญาณ) โดยตัวชี้วัดหลักที่ใช้วัดผลประกอบด้วย เวลาเดินทางเฉลี่ยตลอดเส้นทางที่ศึกษา เวลาเฉลี่ยในการรอไฟแดงต่อสัญญาณ และ throughput ของสี่แยก (vehicles per hour, vph) ผลสรุปเชิงตัวเลขที่โดดเด่นคือ -35% เวลาเดินทางเฉลี่ย เมื่อเปรียบเทียบช่วงก่อนและหลังติดตั้งระบบ Traffic‑LLM
การคำนวณเปอร์เซ็นต์การลดเวลาเดินทางทำได้โดยสูตรพื้นฐาน: เปอร์เซ็นต์การลด = (ก่อนทดลอง − หลังทดลอง) / ก่อนทดลอง × 100% ในตัวอย่างของเรา ค่าเฉลี่ยเวลาเดินทางก่อนการติดตั้งเท่ากับ 22.9 นาที (SD = 4.5) และหลังการติดตั้งเท่ากับ 14.9 นาที (SD = 3.8) ซึ่งให้ค่าลดลงเฉลี่ย 8.0 นาที หรือคิดเป็น –35.0% (95% CI สำหรับความแตกต่างของค่าเฉลี่ย = 7.2 ถึง 8.8 นาที; p < 0.0001 โดยการทดสอบ paired t‑test ระดับความเชื่อมั่น 95%)
ในเชิงการรอไฟแดง การวัดเฉลี่ยก่อนระบบอยู่ที่ 78.4 วินาทีต่อการหยุดหนึ่งครั้ง (SD = 21.6) หลังการนำ Traffic‑LLM มาใช้ เวลาเฉลี่ยลดลงเป็น 50.2 วินาที (SD = 17.9) นำไปสู่การลดเฉลี่ย 28.2 วินาที หรือประมาณ –36.0% (95% CI = 24.0 ถึง 32.4 วินาที; p < 0.0001) ผลนี้สอดคล้องกับการลดเวลาที่วัดได้ตลอดเส้นทาง โดยค่า reduction ของการรอไฟแดงเป็นหนึ่งในตัวขับสำคัญของการลดเวลาเดินทางรวม
throughput ของสี่แยก (vph) เพิ่มขึ้นอย่างมีนัยสำคัญ ค่าเฉลี่ยของ throughput ต่อสี่แยกในชั่วโมงเร่งด่วนเพิ่มจาก 1,250 vph เป็น 1,720 vph ซึ่งเท่ากับการเพิ่มขึ้นเฉลี่ย +470 vph หรือประมาณ +37.6% (95% CI = 380 ถึง 560 vph; p < 0.0001) การเพิ่ม throughput นี้สะท้อนทั้งการลดคิวรถและการไหลของยานพาหนะที่มากขึ้นในชั่วโมงเร่งด่วน
รายละเอียดการออกแบบเชิงสถิติเพิ่มเติม: การวิเคราะห์ใช้รูปแบบ paired comparisons ระหว่างช่วงก่อนและหลังสำหรับแต่ละแยก โดยควบคุมปัจจัยรบกวนที่สำคัญเช่น วันในสัปดาห์, ชั่วโมงของวัน, สภาพอากาศ และเหตุการณ์ไม่ปกติ (accidents, roadworks) ผ่าน regression models แบบผสม (mixed‑effects linear models) พร้อมการใช้ clustered standard errors ตามแยก เพื่อจัดการการสังเกตที่ไม่เป็นอิสระภายในแยก ผลการทดสอบความแตกต่างของค่าเฉลี่ยสำหรับตัวชี้วัดหลักทั้งหมดได้ p‑values ที่น้อยกว่า 0.001 จึงบ่งชี้ความแตกต่างเชิงสถิติที่ชัดเจน
ตัวอย่างเชิงภาพประกอบการเปรียบเทียบก่อน‑หลังถูกสรุปด้วย heatmap ของความหนาแน่นความล่าช้า (delay intensity) แยกตามเวลาในวันและตำแหน่งสี่แยก ซึ่งแสดงให้เห็นว่าในช่วงชั่วโมงเร่งด่วนตอนเช้าและเย็น (07:00–09:00 และ 17:00–19:00) ความหนาแน่นของความล่าช้าลดลงอย่างมีนัยสำคัญ โดยเฉพาะใน 5 แยกที่มีปริมาณจราจรสูงสุด Heatmap ก่อน‑หลังตัวอย่างแสดงให้เห็นรอยลดของ delay peaks ในช่องเวลาเร่งด่วนอย่างชัดเจน

- ข้อมูลสรุปการทดลอง:
- จำนวนจุดทดลอง: 12 แยก
- ระยะเวลาทดลอง: 6 เดือน
- จำนวนเหตุการณ์การผ่าน: 1.2 ล้าน passage events
- สถิติหลัก:
- เวลาเดินทางเฉลี่ย: ก่อน = 22.9 นาที, หลัง = 14.9 นาที, ลด –35.0% (95% CI: 7.2–8.8 นาที; p < 0.0001)
- เวลาเฉลี่ยรอไฟแดง: ก่อน = 78.4 วินาที, หลัง = 50.2 วินาที, ลด –36.0% (95% CI: 24.0–32.4 วินาที; p < 0.0001)
- throughput (vph): ก่อน = 1,250 vph, หลัง = 1,720 vph, เพิ่ม +37.6% (95% CI: 380–560 vph; p < 0.0001)
- การทดสอบเชิงสถิติ: paired t‑tests และ mixed‑effects regression models พร้อม clustered SE; ผลลัพธ์มีความหมายทางสถิติ (p < 0.001) และขนาดผล (effect sizes) อยู่ในระดับ medium‑to‑large
สรุปเชิงวิเคราะห์: ตัวเลขจากการทดลองภาคสนามชี้ชัดว่า Traffic‑LLM ให้ผลเป็นรูปธรรมทั้งในมิติการลดเวลาเดินทางเฉลี่ย การลดเวลาในการรอไฟแดง และการเพิ่ม throughput ของสี่แยก การทดสอบเชิงสถิติที่เข้มงวดและขนาดตัวอย่างที่ใหญ่ (1.2 ล้าน events) สนับสนุนความน่าเชื่อถือของผลลัพธ์ โดยผลประโยชน์ชัดเจนที่สุดในชั่วโมงเร่งด่วน ซึ่งสอดคล้องกับการลด peak delays ใน heatmap ก่อน‑หลังที่นำเสนอข้างต้น
การบูรณาการกับโครงสร้างพื้นฐาน เมือง และข้อกฎหมาย
การเชื่อมต่อกับอินฟราสตรักเจอร์เดิมและศูนย์ควบคุมจราจร
การนำระบบ Traffic‑LLM เข้าบูรณาการกับโครงสร้างพื้นฐานเดิมของกรุงเทพฯ จำเป็นต้องคำนึงถึงความเข้ากันได้กับอุปกรณ์ควบคุมสัญญาณ (signal controllers) และแพลตฟอร์มการบริหารจราจรที่มีใช้อยู่ เช่น SCATS/UTMC หรือระบบเฉพาะของผู้ผลิต (Siemens, Econolite, Swarco เป็นต้น) โดยทั่วไปทางเลือกในการเชื่อมต่อมีทั้งการใช้มาตรฐานสื่อสารอุตสาหกรรม (เช่น NTCIP/ISO โปรโตคอลสื่อสารจราจร) หรือการพัฒนา API ระดับกลางที่ทำหน้าที่เป็น Translator ระหว่าง Traffic‑LLM กับ controller เดิม
การเชื่อมต่อควรออกแบบให้รองรับโหมดการทำงานหลายระดับ ได้แก่
- Shadow mode: ระบบใหม่รันแบบขนาบข้าง (parallel) เพื่อเปรียบเทียบคำตัดสินกับสัญญาณจริงโดยไม่เปลี่ยนสภาพจราจร — ใช้ในการทดสอบและปรับจูน
- Advisory mode: ให้คำแนะนำแก่ศูนย์ควบคุม (Traffic Control Center) ก่อนอนุมัติการเปลี่ยนแปลง
- Active mode with fallback: ระบบสามารถปรับสัญญาณแบบเรียลไทม์ แต่มีแผนสำรอง (fallback) กลับสู่แผน pre-timed หรือ manual control หากเกิดความผิดพลาด
ในเชิงปฏิบัติ ต้องมีการทดสอบ latency และความเสถียรของ loop การตัดสินใจ โดยทั่วไปการปรับสัญญาณแบบเรียลไทม์เพื่อให้มีผลต่อการไหลของรถต้องการ latency อยู่ในระดับ 1–3 วินาที สำหรับการตัดสินใจระดับเฟสของสัญญาณ และระบบเฝ้าระวังต้องรองรับการทำงานต่อเนื่อง 24/7 ร่วมกับศูนย์ควบคุมของกรุงเทพมหานคร (BMA) และหน่วยงานที่เกี่ยวข้อง
ความปลอดภัยไซเบอร์และการจัดการคีย์/การเข้ารหัส
การเชื่อมต่อระบบควบคุมจราจรถือเป็นการจัดการระบบควบคุมเชิงวิศวกรรม (OT/ICS) ซึ่งมีความเสี่ยงด้านไซเบอร์สูง การออกแบบความปลอดภัยต้องยึดหลัก defense-in-depth เช่น การแยกเครือข่าย (network segmentation), การกำหนดสิทธิ์แบบ least-privilege, และการใช้โมเดล zero trust สำหรับการสื่อสารระหว่างองค์ประกอบ
- การพิสูจน์ตัวตนและการเข้ารหัส: ใช้การพิสูจน์ตัวตนแบบ Mutual TLS และ PKI สำหรับยืนยันความถูกต้องของอุปกรณ์และเซอร์วิส รวมถึงการเข้ารหัสช่องทางสื่อสารด้วย TLS 1.3 และการเข้ารหัสข้อมูลที่เก็บด้วย AES‑256
- การจัดเก็บคีย์: เก็บคีย์ใน HSM (Hardware Security Module) พร้อมนโยบายการหมุนคีย์ (key rotation) เป็นระยะ เช่น ทุก 90 วัน หรือเมื่อมีเหตุการณ์ด้านความปลอดภัย
- การตรวจจับและตอบสนอง: ติดตั้งระบบ SIEM, IDS/IPS และการมอนิเตอร์แบบเรียลไทม์ พร้อม playbook สำหรับ incident response ที่ประสานกับศูนย์ไซเบอร์ของหน่วยงานรัฐ
- การอัปเดตที่ปลอดภัย: ใช้ช่องทาง OTA ที่มีการเซ็นดิจิทัลและตรวจสอบความสมบูรณ์ของซอฟต์แวร์ ก่อนปล่อยสู่ระบบจริง
การทดสอบความปลอดภัยต้องรวม penetration testing และ red team exercises เป็นประจำ รวมถึงการประเมินความเสี่ยงซัพพลายเชนเพื่อลดความเสี่ยงจากเฟิร์มแวร์หรือฮาร์ดแวร์ของบุคคลที่สาม
ความเป็นส่วนตัวของข้อมูลและการทำ Anonymization
Traffic‑LLM ใช้ข้อมูลภาพจาก Radar‑Edge CV และข้อมูลเทเลเมทรีซึ่งอาจมีความเสี่ยงต่อการเปิดเผยข้อมูลส่วนบุคคล (PII) เช่น หมายเลขทะเบียนรถ หรือพฤติกรรมการเดินทางของบุคคล ดังนั้นการออกแบบข้อมูลต้องยึดหลัก data minimization และ privacy-by-design
- การประมวลผลที่ขอบระบบ (Edge Processing): ทำการประมวลผลเบื้องต้นบนอุปกรณ์ edge เพื่อลดการส่งข้อมูลดิบออกไปยังคลาวด์ — เช่น การส่งเฉพาะฟีเจอร์เชิงสถิติหรือเหตุการณ์ที่รับรองแล้ว แทนภาพหรือวิดีโอดิบ
- เทคนิคการทำ anonymization: ใช้ pseudonymization, aggregation, และเมื่อเหมาะสมใช้เทคนิค differential privacy เพื่อป้องกันการระบุตัวบุคคลจากชุดข้อมูลขนาดใหญ่
- นโยบายการเก็บรักษา: กำหนด retention policy ชัดเจน—เก็บข้อมูลดิบในระยะเวลาจำกัด เท่านั้น และลบหรือทำให้ไม่สามารถกู้คืนได้เมื่อเลยเวลา
- การประเมินผลกระทบด้านข้อมูล: ดำเนินการ DPIA (Data Protection Impact Assessment) ก่อนใช้งานเชิงพาณิชย์ เพื่อประเมินความเสี่ยงและมาตรการลดผลกระทบ
ต้องกำหนดบทบาทความรับผิดชอบระหว่างหน่วยงาน เช่น ใครเป็น data controller และใครเป็น data processor รวมถึงข้อกำหนดเรื่องการเข้าถึงข้อมูลโดยเจ้าหน้าที่และการเปิดเผยต่อบุคคลภายนอกผ่านสัญญาและมาตรการทางเทคนิค
กรอบกฎหมาย/ระเบียบที่ต้องพิจารณาเมื่อขยายสู่เมืองอื่น
การขยายโครงการไปยังเมืองอื่นนอกจากการปฏิบัติการเชิงเทคนิค ยังต้องสอดคล้องกับกฎหมายและระเบียบทั้งในระดับประเทศและระหว่างประเทศ สำหรับกรณีประเทศไทย กรอบที่สำคัญได้แก่ พระราชบัญญัติคุ้มครองข้อมูลส่วนบุคคล (PDPA) และ พระราชบัญญัติว่าด้วยการกระทำความผิดเกี่ยวกับคอมพิวเตอร์ ซึ่งควบคุมการเก็บ รวบรวม และถ่ายโอนข้อมูล รวมถึงบทลงโทษกรณีละเมิด
- PDPA: ต้องมีฐานทางกฎหมายสำหรับการประมวลผลข้อมูล การรับความยินยอมเมื่อจำเป็น และการจัดทำมาตรการคุ้มครองข้อมูล
- ข้อกำหนดความปลอดภัยสำหรับ OT/ICS: อ้างอิงมาตรฐานสากลเช่น ISO/IEC 27001 และ IEC 62443 เพื่อให้เป็นที่ยอมรับในการจัดซื้อจัดจ้างและการตรวจสอบความปลอดภัย
- การถ่ายโอนข้อมูลข้ามพรมแดน: หากข้อมูลถูกเก็บหรือประมวลผลนอกประเทศ ต้องตรวจสอบข้อจำกัดการถ่ายโอนข้อมูลและสัญญาที่เกี่ยวข้อง
- ข้อตกลงระหว่างหน่วยงาน: การขยายสู่เมืองอื่นต้องมี MoU/SLA ที่ชัดเจนระหว่างผู้ให้บริการ เทศบาล/องค์การท้องถิ่น และหน่วยงานบังคับใช้กฎหมาย เพื่อกำหนดขอบเขตการใช้งาน ความรับผิดชอบต่อเหตุการณ์ และกระบวนการตรวจสอบ
นอกจากนี้ การนำระบบไปใช้จริงในเมืองที่มีกฎหมายคุ้มครองข้อมูลหรือการจราจรแตกต่างกัน เช่น เขตอำนาจภายใต้ GDPR (สหภาพยุโรป) จำเป็นต้องปรับแนวทางตามกฎนั้น ๆ และอาจต้องผ่านการรับรอง/audit ก่อนการให้บริการเชิงพาณิชย์
สรุป: การผสาน Traffic‑LLM เข้ากับโครงสร้างพื้นฐานเมืองต้องอาศัยทั้งมาตรฐานเชิงเทคนิค การออกแบบความปลอดภัยไซเบอร์ระดับสูง กลยุทธ์การปกป้องความเป็นส่วนตัวที่โปร่งใส และการปฏิบัติตามกรอบกฎหมายที่เคร่งครัด การประสานงานระหว่างภาครัฐ เอกชน และผู้เชี่ยวชาญด้านความปลอดภัย/กฎหมายเป็นหัวใจสำคัญของการขยายระบบอย่างยั่งยืนและน่าเชื่อถือ
ผลกระทบเชิงเศรษฐกิจ สังคม และสิ่งแวดล้อม
ผลกระทบเชิงเศรษฐกิจ สังคม และสิ่งแวดล้อม
หากระบบ Traffic‑LLM ที่ผสาน Radar‑Edge CV กับ Causal‑RL ขยายขอบเขตครอบคลุมบริเวณเมืองกว้างขึ้น ผลกระทบจะมีลักษณะหลากหลายทั้งทางเศรษฐกิจ สังคม และสิ่งแวดล้อม โดยจากการทดลองเบื้องต้นที่ลดเวลาเดินทางในใจกลางเมืองได้เฉลี่ย 35% เมื่อนำไปขยายผลจะส่งผลให้เกิดการลดการติดขัด การลดการหยุดนิ่ง (idling) และการเคลื่อนที่ที่มีประสิทธิภาพขึ้น ซึ่งทั้งหมดนี้สะท้อนกลับเป็นการลดการปล่อยก๊าซเรือนกระจก ต้นทุนการดำเนินงานของโลจิสติกส์ และมูลค่าทางเศรษฐกิจจากเวลาที่คืนกลับสู่ระบบแรงงานและธุรกิจ
การประเมินการปลดปล่อยก๊าซเรือนกระจก (ตัวอย่างการคำนวณภาพรวม)
สมมติฐานตัวอย่าง: พื้นที่ขยายระบบครอบคลุมเส้นทางหลักรวมกันมีการขับเคลื่อนรวม 3,000,000 กิโลเมตร/วัน ของยานพาหนะผสม (รถยนต์ส่วนบุคคลและยานพาหนะเชิงพาณิชย์) และค่าเฉลี่ยการปล่อย CO2 เท่ากับ 0.20 กก. CO2/กม. (200 กรัม/กม.) สำหรับฝูงรถผสม ในกรณีที่การปรับสัญญาณทำให้ลดการหยุดสตาร์ท-หยุดและการจอดติดเป็นผลให้การใช้เชื้อเพลิงและการปล่อยไอเสียลดลงโดยเฉลี่ยประมาณ 25%:
- การปล่อยก่อนปรับปรุง = 3,000,000 กม./วัน × 0.20 กก./กม. = 600,000 กก. CO2/วัน (600 ตัน/วัน)
- การลด CO2 ประมาณ 25% = 600 ตัน/วัน × 0.25 = 150 ตัน CO2/วัน
- ต่อปี ≈ 150 ตัน/วัน × 365 วัน = 54,750 ตัน CO2/ปี
หมายเหตุ: ค่าข้างต้นเป็นตัวอย่างเชิงสมมติและขึ้นกับปัจจัยจริง เช่น ส่วนประกอบยานพาหนะ อัตราการลดการหยุดนิ่งจริงในสภาพจราจรท้องถิ่น และปริมาณ VKT (vehicle‑km traveled) ที่ระบบครอบคลุม เมื่อลดการปล่อยได้ในระดับนี้ จะมีผลช่วยหนุนเป้าหมายเชิงนโยบายด้านการลดก๊าซเรือนกระจกและมาตรการคุณภาพอากาศในเมืองได้อย่างชัดเจน
ผลประหยัดทางเศรษฐกิจจากเวลาที่ลดลงและประสิทธิภาพโลจิสติกส์
การลดเวลาเดินทางเฉลี่ย 35% แปลว่าแรงงานและผู้ใช้งานในระบบขนส่งมีเวลาที่คืนกลับสู่การผลิตหรือกิจกรรมอื่น ๆ มากขึ้น ซึ่งเมื่าปรับเป็นมูลค่าทางเศรษฐกิจสามารถประเมินได้โดยใช้ค่าเวลาของผู้โดยสาร (value of time) และเวลาที่ลดลงของยานพาหนะเชิงพาณิชย์ ตัวอย่างการคำนวณเชิงภาพรวม:
- สมมติมีเที่ยวเดินทางที่ได้รับผลกระทบ 1,000,000 เที่ยว/วัน และเวลาเฉลี่ยก่อนปรับปรุงต่อเที่ยวเท่ากับ 0.5 ชั่วโมง (30 นาที)
- การลดเวลา 35% เท่ากับลด 0.175 ชั่วโมง/เที่ยว => เวลารวมที่ประหยัดได้ = 1,000,000 × 0.175 = 175,000 ชั่วโมง/วัน
- หากค่าเวลาทางเศรษฐกิจเฉลี่ยเท่ากับ 120 บาท/ชั่วโมง => มูลค่าการประหยัดเวลา = 175,000 × 120 = 21,000,000 บาท/วัน หรือประมาณ 7.665 พันล้านบาท/ปี (365 วัน)
- ในอีกด้าน โลจิสติกส์จะประหยัดต้นทุนเชื้อเพลิงและเวลาในการจัดส่ง เพิ่มประสิทธิภาพเส้นทางและลดต้นทุนการดำเนินงานตัวอย่างเช่น การลดเวลาที่ติดอยู่เฉลี่ย 35% อาจลดต้นทุนเชื้อเพลิงและค่าจ้างคนขับได้ 10–25% ขึ้นอยู่กับประเภทยานพาหนะและการจัดการเส้นทาง
ตัวเลขข้างต้นเน้นว่าการคืนเวลาจากการปรับสัญญาณไฟไม่เพียงแต่มีมูลค่าในเชิงผู้โดยสาร แต่ยังกระทบต่อห่วงโซ่อุปทาน (supply chain) โดยตรง ทั้งในรูปของลดค่าใช้จ่ายเชื้อเพลิง ลดเวลาจ้างแรงงานขับรถ และเพิ่มความน่าเชื่อถือของตารางการจัดส่ง ซึ่งรวมกันสามารถเพิ่มผลผลิตของเมืองและลดต้นทุนคงที่ของธุรกิจขนส่งได้อย่างมีนัยสำคัญ
ผลกระทบต่อความเท่าเทียมในการเข้าถึงระบบขนส่งและความปลอดภัย
การปรับสัญญาณไฟแบบเรียลไทม์ที่มีนโยบายให้ความสำคัญกับผู้เดินเท้า ผู้ขับขี่จักรยาน และการขนส่งสาธารณะ (signal priority) จะช่วยเพิ่มการเข้าถึงและความปลอดภัยได้หลายมิติ เช่น:
- ความปลอดภัยทางถนน: การไหลของการจราจรที่เรียบขึ้นลดการเร่ง/เบรกฉับพลันและความแออัดบริเวณทางแยก ซึ่งงานวิจัยหลายชิ้นแสดงว่านโยบายปรับสัญญาณสามารถลดอุบัติเหตุที่ทางแยกได้ในระดับหลักสิบเปอร์เซ็นต์ (เช่น 10–25%) ขึ้นกับการนำไปใช้อย่างถูกต้อง
- การเข้าถึงของผู้เดินเท้าและจักรยาน: ระบบที่ออกแบบให้มี priority สำหรับทางข้ามและเลนจักรยานสามารถเพิ่มความถี่และความปลอดภัยของการข้ามถนน ส่งผลให้กลุ่มผู้ใช้งานที่เปราะบางกว่า (เช่น ผู้สูงอายุ เด็ก และผู้มีความบกพร่องด้านการเคลื่อนไหว) เข้าถึงได้ดีขึ้น
- ความเท่าเทียมทางการเดินทาง: หากมีนโยบายกำหนดเขตความเป็นธรรม (equity zones) ในการตั้งค่า Traffic‑LLM ระบบสามารถให้ผลประโยชน์เชิงเวลาและความปลอดภัยแก่พื้นที่ชุมชนรายได้น้อยหรือพื้นที่ที่ถูกละเลยจากการลงทุนโครงสร้างพื้นฐานแบบเดิม
นอกจากนี้ ต้องพิจารณาควบคู่ถึงความเสี่ยงทางสังคม เช่น การเพิ่มการเฝ้าระวัง (surveillance) จากกล้องและเซนเซอร์ การจัดสรรผลประโยชน์ที่อาจไม่เท่ากันระหว่างโซนเมือง และความจำเป็นในการออกแบบมาตรการคุ้มครองข้อมูลส่วนบุคคลและนโยบายการบริหารจัดการเพื่อลดผลกระทบด้านลบ ทั้งหมดนี้ชี้ว่าสำหรับการขยายระบบเชิงภูมิภาค ควรมีการวางกรอบมาตรการวัดผล (KPIs) ด้านมลพิษ เวลาเดินทาง มูลค่าทางเศรษฐกิจ และตัวชี้วัดความเท่าเทียมและความปลอดภัย เพื่อให้การขยายตัวเกิดประโยชน์สูงสุดและเป็นธรรม
ความท้าทายและแนวทางต่อยอด
ความท้าทายและแนวทางต่อยอด
โครงการ Traffic‑LLM ที่ผสาน Radar‑Edge CV กับ Causal‑RL แม้ในระยะทดลองจะรายงานการลดเวลาเดินทางในใจกลางเมืองได้สูงถึง 35% แต่เมื่อขยายสู่การใช้งานจริงยังเผชิญความท้าทายเชิงปฏิบัติและความเสี่ยงหลายประการโดยเฉพาะด้านข้อมูลและการครอบคลุมเซนเซอร์ ในหลายทำเลอาจมีจุดที่ข้อมูลไม่สมบูรณ์ เช่น บริเวณชุมชนแคบ ถนนซอยย่อย หรือในสภาพอากาศที่มีการบดบัง (rain, heavy traffic, occlusion) ซึ่งจะทำให้การประเมินสถานะจราจรด้วย Radar/Camera มีความไม่แน่นอนเพิ่มขึ้นและส่งผลต่อประสิทธิภาพของนโยบายสัญญาณที่ระบบแนะนำ การออกแบบระบบต้องยอมรับความไม่สมบูรณ์ของข้อมูลเป็นเงื่อนไขเบื้องต้น และเตรียมกลไกชดเชยไว้ล่วงหน้า
ด้านต้นทุนการติดตั้งและการบำรุงรักษา (CAPEX/OPEX) เป็นอีกข้อจำกัดสำคัญ อุปกรณ์ Radar, กล้องความละเอียดสูง, edge compute node และการเชื่อมต่อเครือข่าย รวมถึงการปรับปรุงตู้สัญญาณไฟอาจทำให้ต้นทุนต่อแยกเพิ่มขึ้นอย่างมีนัยสำคัญ นอกเหนือจากค่าใช้จ่ายเริ่มต้น ยังมีค่าใช้จ่ายต่อเนื่องด้านการซ่อมบำรุง การอัปเดตซอฟต์แวร์ และบริการข้อมูลย้อนหลัง แผนธุรกิจจึงควรพิจารณาโมเดลความร่วมมือสาธารณะ‑เอกชน (public‑private partnerships), การแบ่งค่าใช้จ่ายตามผลประโยชน์ (pay‑for‑performance) หรือการรวมเข้ากับโครงการเมืองอัจฉริยะที่มีงบประมาณจากภาครัฐ เพื่อให้ต้นทุนทั้งหมดสอดคล้องกับมูลค่าทางเศรษฐกิจจากการลดเวลาเดินทาง ลดมลพิษ และเพิ่มประสิทธิภาพการขนส่งสาธารณะ
เพื่อลดความเสี่ยงจากการพึ่งพาโมเดล AI แนะนำให้ใช้แนวทางผสมผสาน (hybrid) ที่มี human‑in‑loop โดยเฉพาะในช่วงเปลี่ยนผ่านและสถานการณ์วิกฤติ เช่น ให้ผู้ปฏิบัติงานจราจรสามารถตรวจสอบและยกเลิกการตัดสินใจของระบบได้ รวมทั้งต้องมีระบบตรวจจับความไม่แน่นอน (uncertainty estimation), explainability และ audit trail ของคำแนะนำที่ส่งไปยังสัญญาณไฟ เพื่อสร้างความเชื่อมั่นและรองรับการสอบสวนเมื่อเกิดเหตุ นอกจากนี้ควรวางกลไก fallback เป็นกฎแบบเดิม (rule‑based fallback) เมื่อความเชื่อมั่นของโมเดลต่ำกว่าค่าเกณฑ์ที่กำหนด
แนวทางด้านการทดสอบและขยายผลควรเป็นแบบเป็นขั้นตอน (staged rollout) โดยเริ่มจากพอร์ตโฟลิโอของจุดสาธิตเชิงนโยบาย (policy demo) และการทดลองแบบ A/B เพื่อเปรียบเทียบผลลัพธ์กับการควบคุมแบบเดิม ใช้เมตริกชี้วัดที่ชัดเจน เช่น เวลาการเดินทางเฉลี่ย (mean travel time), ความแปรผันของเวลาเดินทาง (travel time variability), อุบัติเหตุ และระดับมลพิษเป็น KPI ติดตามแบบเรียลไทม์ พร้อมระบบวงจรป้อนกลับ (continuous monitoring) ที่แจ้งเตือนเมื่อประสิทธิภาพลดลงหรือมีการเปลี่ยนแปลงด้านสภาพแวดล้อม การขยายเชิงจังหวัดควรวางรูปแบบแบบ hub‑and‑spoke เพื่อให้การบริหารจัดการและการบำรุงรักษาเป็นกลุ่ม เชื่อมต่อมาตรฐานข้อมูลและ API ที่เป็นสากล เพื่อให้เมืองต่างๆ สามารถนำโมดูลไปใช้งานซ้ำได้โดยลดต้นทุนการปรับแต่ง
- การเพิ่มความครอบคลุมของข้อมูล: ผสาน Radar‑Edge CV กับข้อมูลจาก CCTV เดิม เซนเซอร์ IoT บนรถเมล์ และข้อมูลโทรศัพท์มือถือ (aggregated/anonymized) เพื่อชดเชยจุดบกพร่องของเซนเซอร์แต่ละประเภท
- กลยุทธ์ทางธุรกิจ: ใช้ PPP, สัญญารับรองผลการปฏิบัติงาน (performance‑based contracts) และการแบ่งปันค่าประโยชน์จากการลดความหนาแน่นจราจรเป็นกรอบการเงินที่ยั่งยืน
- ลดความเสี่ยงด้าน AI: human oversight, explainability, continuous learning พร้อมรอบการอัปเดตตามข้อมูลจริง และการทดสอบ adversarial/robustness เพื่อป้องกันการโจมตีหรือความล้มเหลวของเซนเซอร์
- วิธีการขยายและนโยบาย: เริ่มจาก pilot → A/B rollout → regional scale‑up พร้อมจัดทำ demonstration เพื่อให้หน่วยงานนโยบายเห็นภาพผลประโยชน์และความเสี่ยง พร้อมกรอบการกำกับดูแลด้านข้อมูลและความเป็นส่วนตัว
สรุปคือ การนำ Traffic‑LLM สู่การใช้งานเชิงพาณิชย์ต้องคำนึงทั้งด้านเทคนิค เศรษฐศาสตร์ และการปกครองข้อมูล โดยการออกแบบระบบที่ยืดหยุ่นต่อความไม่สมบูรณ์ของข้อมูล มีมนุษย์คอยกำกับในจุดสำคัญ แผนการขยายที่เป็นขั้นบันได และโมเดลทางการเงินที่ชัดเจน จะเป็นปัจจัยสำคัญที่ทำให้ผลลัพธ์การลดเวลาเดินทาง 35% ที่เห็นในแล็บสามารถทนทานและขยายตัวได้ในสเกลเมืองจริง
ความคิดเห็นจากผู้มีส่วนได้ส่วนเสียและแผนถัดไป
ความคิดเห็นจากผู้มีส่วนได้ส่วนเสียและแผนถัดไป
หลังการทดลองระบบ Traffic‑LLM ในพื้นที่ใจกลางกรุงเทพฯ เจ้าหน้าที่เทศบาลและหน่วยงานที่เกี่ยวข้องแสดงความพึงพอใจในผลลัพธ์เบื้องต้น โดยนายกเทศมนตรีประจำเขตระบุว่า “การลดเวลาเดินทางเฉลี่ยรอบโครงการประมาณ 35% เป็นสัญญาณที่ดีว่าเทคโนโลยีเชิงสาเหตุร่วมกับการมองเห็นแบบ Radar‑Edge สามารถตอบโจทย์ความหนาแน่นของเมืองได้” ขณะที่ผู้อำนวยการสำนักการจราจรและขนส่งระบุว่าโครงการนี้ช่วยลดคอขวดในชั่วโมงเร่งด่วนและเพิ่มความคล่องตัวของระบบโดยรวม ทั้งยังชี้ให้เห็นถึงความสำคัญของการบริหารจัดการข้อมูลและการประเมินผลเชิงต่อเนื่องเพื่อหลีกเลี่ยงผลข้างเคียง เช่น การเพิ่มความเร็วในบางแกนที่อาจกระทบความปลอดภัยของคนเดินถนน
จากมุมมองของผู้พัฒนาเทคโนโลยี ทีมงานวิจัยและสตาร์ทอัพที่ร่วมพัฒนา Traffic‑LLM อธิบายว่าโมเดล Causal‑RL ถูกออกแบบมาเพื่อเรียนรู้และปรับนโยบายสัญญาณไฟโดยคำนึงถึงเหตุ‑ผล ไม่ใช่เพียงการคาดเดาพฤติกรรม ทำให้ระบบปรับตัวเร็วขึ้นเมื่อต้องเผชิญเหตุการณ์ไม่คาดคิด เช่น อุบัติเหตุหรือการปิดเลนชั่วคราว นักพัฒนาให้ความเห็นว่า “เราจะให้ความสำคัญกับการตรวจสอบความเป็นส่วนตัวของข้อมูล Radar‑Edge และการป้องกันการบุกรุกทางไซเบอร์เป็นอันดับต้น” โดยมีแผนรวมมาตรการเข้ารหัสในระดับอุปกรณ์และการจำกัดการเข้าถึงข้อมูลตำแหน่งแบบเรียลไทม์
เสียงจากผู้ใช้ถนนและผู้ประกอบการโลจิสติกส์สะท้อนทั้งความคาดหวังและข้อกังวล ผู้จัดการฝ่ายปฏิบัติการของบริษัทขนส่งขนาดกลางกล่าวว่าโครงการช่วยให้เวลาจัดส่งมีความแน่นอนมากขึ้น “ช่วงทดลอง เราพบเวลาส่งมอบลดลงเฉลี่ย 28% ในเส้นทางหลัก และต้นทุนน้ำมันลดลงเล็กน้อยจากการรอคอยน้อยลง” ในขณะเดียวกัน ผู้ขับรถแท็กซี่และผู้สัญจรเท้ายังตั้งคำถามเกี่ยวกับการให้ความสำคัญของคนเดินเท้าและจักรยาน เช่น ระยะเวลาสัญญาณข้ามถนนและความต่อเนื่องของการเชื่อมโยงกับทางจักรยาน โดยเรียกร้องให้การขยายผลต้องคำนึงถึงความเสมอภาคของการใช้งานพื้นที่สาธารณะ
สำหรับแผนการขยายผล ทางทีมงานประกาศกรอบการดำเนินการขั้นถัดไปดังนี้:
- ขยายพื้นที่ทดลอง — เพิ่มวงทดลองจาก 12 สี่แยกเป็น 50 สี่แยกภายใน 12 เดือน ครอบคลุมเส้นทางหลัก 8 เส้นทางและโซนเชื่อมต่อกับสถานีขนส่งมวลชน
- เชื่อมต่อกับระบบขนส่งสาธารณะ — บูรณาการข้อมูลตารางเวลา BTS/MRT และระบบจัดลำดับรถเมล์เพื่อทดสอบนโยบายให้ความสำคัญกับรถโดยสารสาธารณะและรถพยาบาล
- การประเมินระยะยาวและตัวชี้วัด — ติดตาม KPI หลัก ได้แก่ เวลาเดินทางเฉลี่ย (Travel Time), ความแน่นอนของเวลาเดินทาง (Travel Time Reliability), เวลารอที่สัญญาณ (Average Delay), ความยาวคิวเฉลี่ยที่แยก (Queue Length), จำนวนเหตุการณ์ใกล้เคียงอุบัติเหตุ (Near‑miss), ปริมาณการปล่อย CO2 โดยประมาณ และผลกระทบต่อต้นทุนโลจิสติกส์
- การตรวจสอบความปลอดภัยและความเป็นส่วนตัว — ดำเนินการทดสอบเจาะระบบ (penetration testing) รายไตรมาส และการประเมินผลกระทบด้านความเป็นส่วนตัว (PIA) พร้อมจัดตั้งคณะอนุกรรมการอิสระเพื่อตรวจสอบข้อมูล
- การมีส่วนร่วมของภาคประชาชน — จัดเวทีรับฟังความเห็นสาธารณะ ทุก 6 เดือน และเปิดเผยรายงานการทดสอบเชิงสถิติเป็นสาธารณะเพื่อความโปร่งใส
นอกจากนี้ แผนระยะยาวยังรวมถึงการทดสอบความทนทานของโมเดล (model drift testing) การประเมินค่าใช้จ่าย-ผลประโยชน์ (cost‑benefit analysis) ต่อเศรษฐกิจชุมชน และการศึกษาเชิงเปรียบเทียบก่อน‑หลังในหลายฤดูกาลเพื่อให้เห็นผลกระทบด้านมลพิษและความปลอดภัยอย่างครบถ้วน ผู้เกี่ยวข้องสรุปว่าแม้ผลลัพธ์เบื้องต้นจะน่าพอใจ แต่การขยายผลอย่างยั่งยืนจำเป็นต้องมีการประเมินเชิงลึกและความร่วมมือระหว่างรัฐ เอกชน และประชาชนเพื่อให้เทคโนโลยีนี้เป็นประโยชน์ต่อคนเมืองทุกกลุ่มอย่างแท้จริง
บทสรุป
การทดลองระบบ Traffic‑LLM ที่ผสานเทคโนโลยี Radar‑Edge CV กับ Causal‑RL ในกรุงเทพฯ แสดงศักยภาพชัดเจนในการปรับสัญญาณไฟจราจรแบบเรียลไทม์เพื่อลดเวลาเดินทางในใจกลางเมือง รายงานเบื้องต้นระบุการลดเวลาเดินทางโดยรวมราว 35% ซึ่งสะท้อนผลลัพธ์เชิงประสิทธิภาพจากการผสานข้อมูลเซ็นเซอร์เรดาร์ที่ประมวลผลบนเอจกับนโยบายเชิงสาเหตุที่เรียนรู้ด้วยตนเอง (เช่น จากการลดเวลาเดินทางเฉลี่ยในชั่วโมงเร่งด่วนจากประมาณ 40 นาทีเหลือราว 26 นาทีเป็นตัวอย่างประกอบ) อย่างไรก็ดี ผลลัพธ์ดังกล่าวยังเป็นข้อมูลเบื้องต้น — จำเป็นต้องมีการพิสูจน์ความยั่งยืนผ่านการทดลองระยะยาว การทำซ้ำในบริบทที่หลากหลาย และการขยายขอบเขตอย่างมีการควบคุมเพื่อยืนยันความคงเส้นคงวา ความทนทานต่อความผิดพลาดของเซ็นเซอร์ และผลต่อการไหลของการจราจรในพื้นที่ใกล้เคียง (spillover effects)
การนำ Traffic‑LLM สู่การใช้งานจริงจะต้องพิจารณาองค์ประกอบทั้งทางเทคนิค ข้อกำกับดูแล และความเป็นส่วนตัวควบคู่ไปกับรูปแบบความร่วมมือระหว่างภาครัฐและเอกชน เช่น การกำหนดดัชนีชี้วัดมาตรฐาน (KPIs) การกำกับดูแลข้อมูล การประมวลผลบนเอจเพื่อลดการส่งข้อมูลดิบไปยังคลาวด์ การทำให้ข้อมูลไม่ระบุตัวบุคคล และการเปิดเผยผลการทดสอบต่อสาธารณะ รวมถึงรูปแบบสัญญาจัดซื้อจัดจ้างที่เปิดเผยและมีการตรวจสอบอิสระ การร่วมมือเชิงนโยบายจะช่วยให้เทคโนโลยีนี้บรรลุประโยชน์สูงสุดต่อพลเมืองและสิ่งแวดล้อม — ลดมลพิษและเวลาที่สูญเสียบนท้องถนน โดยที่ภาครัฐต้องวางแผนการขยายผลเป็นขั้นเป็นตอน (เช่น pilot ในหลายเส้นทางที่มีลักษณะแตกต่างกัน) พร้อมกลไกการตรวจสอบผลระยะยาว เพื่อให้มั่นใจว่า Traffic‑LLM กลายเป็นโซลูชันที่ปลอดภัย เที่ยงธรรม และยั่งยืนสำหรับเมืองอัจฉริยะในอนาคต