ในยุคที่ปัญญาประดิษฐ์ก้าวกระโดดจนกลายเป็นพลังขับเคลื่อนหลักของนวัตกรรม ทางด้านหุ่นยนต์ก็ไม่ยืนอยู่เฉย: หุ่นยนต์ที่ขับเคลื่อนด้วยเทคนิคอย่าง reinforcement learning, sim-to-real และ meta-learning เริ่มเรียนรู้ทักษะซับซ้อนได้รวดเร็วและแม่นยำจนในบางสถานการณ์สามารถทำได้ดีกว่ามนุษย์ผู้เชี่ยวชาญ ตัวอย่างเช่น การทดลองจับวัตถุและการปรับตัวกับสภาพแวดล้อมที่ไม่คาดคิดแสดงให้เห็นว่าการนำโมเดลจากการจำลองมาใช้ร่วมกับการปรับแต่งแบบ meta-learning ช่วยลดเวลาในการฝึกจริงลงอย่างมาก — บางกรณีรายงานการลดเวลาถึงหลายเท่าเมื่อเทียบกับวิธีดั้งเดิม — และผลลัพธ์ก็มีความเสถียรเพิ่มขึ้นในสภาพแวดล้อมโลกจริง
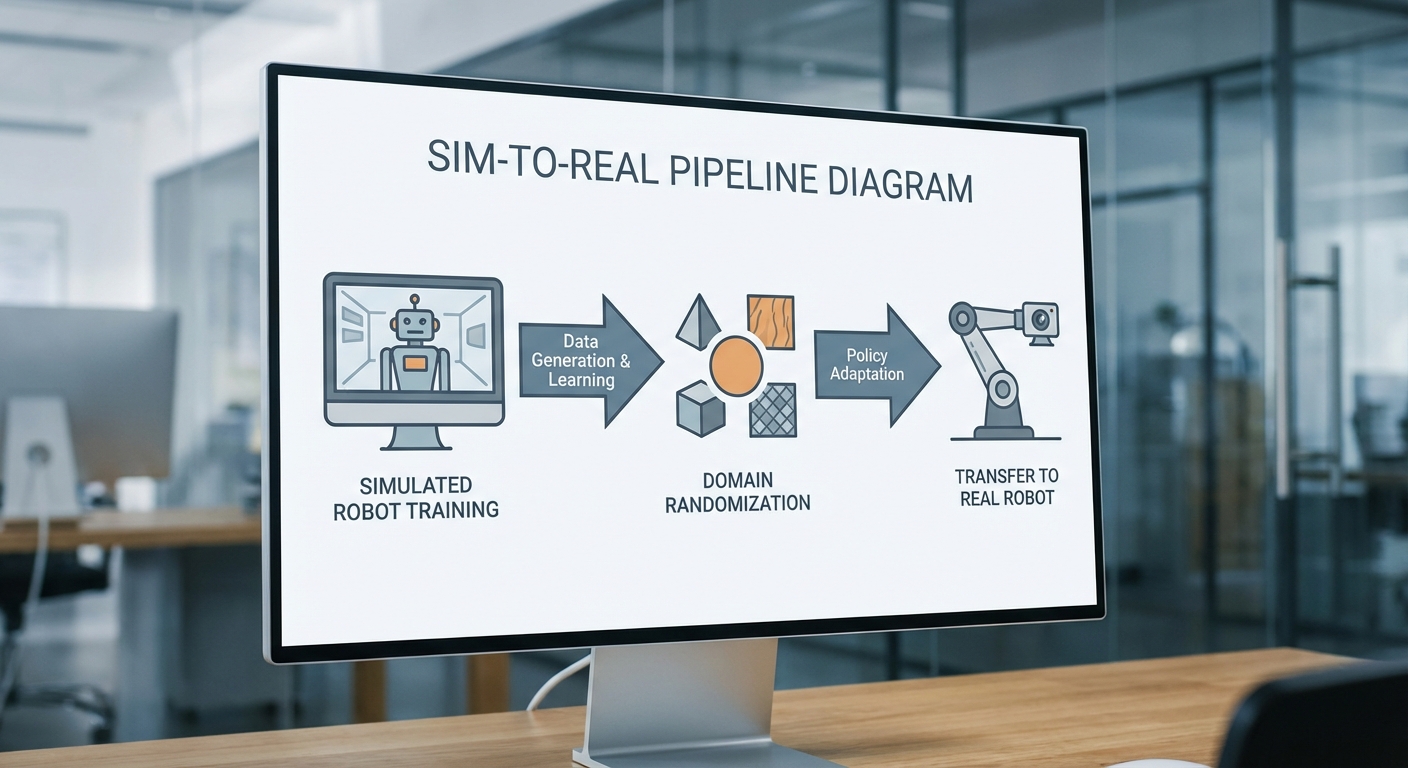
บทนำชิ้นนี้จะพาอ่านรู้จักแก่นของแต่ละเทคนิคที่กล่าวถึง: วิธีที่ reinforcement learning สร้างนโยบายการตัดสินใจจากการลองผิดลองถูก, วิธีที่ sim-to-real และ domain randomization ช่วยให้การเรียนรู้จากการจำลองใช้งานได้จริงในโลกแห่งความจริง และบทบาทของ meta-learning ในการทำให้ระบบปรับตัวเร็วขึ้นเมื่อเผชิญกับงานใหม่ ๆ เราจะยกตัวอย่างงานวิจัยและการประยุกต์จริง ทั้งจากภาคอุตสาหกรรมและห้องวิจัย รวมถึงสถิติและกรณีศึกษาเพื่อประกอบการวิเคราะห์
ท้ายที่สุด บทความจะสำรวจผลกระทบในวงกว้างต่อการศึกษา การฝึกงาน และนโยบายสาธารณะ: จากการปรับหลักสูตรเพื่อเน้นทักษะการทำงานร่วมกับระบบอัตโนมัติ ไปจนถึงมาตรการด้านความปลอดภัย การรับรองมาตรฐาน และแผนการพัฒนากำลังคนที่ต้องรีสกิลให้ทันต่อการเปลี่ยนแปลง ผู้อ่านจะได้เห็นทั้งโอกาสและความท้าทาย พร้อมแนวทางเชิงนโยบายที่น่าสนใจสำหรับการเตรียมความพร้อมสู่ยุคใหม่ของการศึกษาในโลกเทคโนโลยี
บทนำ: ทำไมการเรียนรู้ของหุ่นยนต์สำคัญในยุค AI
บทนำ: ทำไมการเรียนรู้ของหุ่นยนต์สำคัญในยุค AI
ในยุคที่ปัญญาประดิษฐ์ (AI) กลายเป็นองค์ประกอบสำคัญของการเปลี่ยนแปลงทางธุรกิจและสังคม ความสามารถของหุ่นยนต์ในการ เรียนรู้ ไม่ใช่เพียงเรื่องของการเขียนโปรแกรมล่วงหน้าอีกต่อไป แต่หมายถึงความสามารถในการปรับตัว พยากรณ์ และตัดสินใจจากข้อมูลเชิงประจักษ์ การเรียนรู้ของหุ่นยนต์ในบริบทนี้ครอบคลุมตั้งแต่เทคนิคการเรียนรู้เชิงเครื่อง (machine learning) และการเรียนรู้เชิงลึก (deep learning) ไปจนถึงการเรียนรู้แบบเสริมกำลัง (reinforcement learning) ซึ่งช่วยให้หุ่นยนต์พัฒนา พฤติกรรม และกลยุทธ์การทำงานได้ด้วยตนเองตามสภาพแวดล้อมที่เปลี่ยนแปลง
ความสำคัญเชิงเศรษฐกิจและสังคมของการที่หุ่นยนต์เรียนรู้ได้เร็วและมีประสิทธิภาพอยู่ที่ผลกระทบต่อห่วงโซ่อุปทาน การผลิต การบริการ และแรงงาน ตัวอย่างเช่น อุตสาหกรรมการผลิตสามารถลดเวลาหยุดชะงัก (downtime) และเพิ่มผลผลิตผ่านการเรียนรู้และการปรับตัวของหุ่นยนต์ ในภาคบริการ หุ่นยนต์ที่เรียนรู้ได้สามารถปรับปรุงการตอบสนองต่อลูกค้า การจัดการคลังสินค้า และการดูแลผู้สูงอายุ ส่งผลให้ต้นทุนโดยรวมลดลงและคุณภาพการให้บริการสูงขึ้น จากการสำรวจเชิงอุตสาหกรรมหลายฉบับ พบว่าองค์กรจำนวนมากวางแผนเพิ่มการลงทุนด้านหุ่นยนต์และ AI โดยคาดหวังการเพิ่มผลผลิตและประสิทธิภาพอย่างเป็นรูปธรรม
นอกจากนี้ ผลกระทบทางสังคมมีความหลากหลาย ตั้งแต่การเปลี่ยนแปลงรูปแบบงานและทักษะที่ต้องการ ไปจนถึงประเด็นด้านความเป็นธรรมของการจ้างงานและการคุ้มครองข้อมูล ตัวอย่างสั้นๆ ที่สะท้อนประเด็นคือ โรงงานที่ใช้หุ่นยนต์ร่วมกับระบบเรียนรู้เชิงลึกสามารถลดข้อผิดพลาดของการประกอบชิ้นส่วนลงได้มากกว่า ครึ่งหนึ่ง ขณะที่ศูนย์กระจายสินค้าที่ใช้หุ่นยนต์อัตโนมัติและการมองเห็นด้วยคอมพิวเตอร์สามารถเพิ่มความเร็วในการจัดส่งและลดต้นทุนแรงงานได้อย่างเห็นได้ชัด
บทความฉบับนี้มุ่งตอบคำถามสำหรับผู้นำธุรกิจ ผู้บริหารด้านเทคโนโลยี และนักวางนโยบาย โดยจะนำเสนอภาพรวมเชิงเทคนิคและเชิงยุทธศาสตร์ของหัวข้อ ได้แก่
- นิยามและกรอบการเรียนรู้ของหุ่นยนต์ — อธิบายรูปแบบการเรียนรู้หลักและตัวอย่างเทคโนโลยีที่ใช้งานจริง
- ผลกระทบทางเศรษฐกิจและสังคม — วิเคราะห์โอกาสและความเสี่ยงที่ธุรกิจต้องรับมือ
- กรณีศึกษาและสถิติ — ยกตัวอย่างการใช้งานจริงในอุตสาหกรรมต่างๆ พร้อมข้อมูลเชิงตัวเลข
- แนวทางการนำไปใช้และนโยบายที่แนะนำ — คำแนะนำเชิงปฏิบัติสำหรับองค์กรที่ต้องการเร่งการนำหุ่นยนต์เรียนรู้ไปใช้
ต่อจากนี้ ผู้อ่านจะได้เห็นทั้งภาพรวมเชิงทฤษฎี ความเป็นไปได้ทางธุรกิจ และแนวทางปฏิบัติที่ช่วยให้การลงทุนในหุ่นยนต์และ AI สร้างมูลค่าได้จริงในระยะยาว
เทคโนโลยีหลัก: วิธีที่ AI ทำให้หุ่นยนต์เรียนรู้เร็วขึ้น
เทคโนโลยีหลัก: วิธีที่ AI ทำให้หุ่นยนต์เรียนรู้เร็วขึ้น
ในยุคที่ธุรกิจทั้งภาคการผลิต โลจิสติกส์ และบริการต้องการการปรับเปลี่ยนอย่างรวดเร็ว เทคโนโลยี AI กลายเป็นหัวใจสำคัญที่ช่วยให้หุ่นยนต์เรียนรู้และปรับตัวได้เร็วขึ้น โดยไม่ต้องพึ่งพาการทดลองในโลกจริงจำนวนมากที่สุด การผสานเทคนิคเช่น reinforcement learning, imitation learning, sim-to-real transfer, transfer learning และ meta-learning ทำให้การพัฒนาระบบหุ่นยนต์มีความคุ้มค่าและลดความเสี่ยงจากการทดลองบนอุปกรณ์จริง
-
Reinforcement Learning (RL): การเรียนรู้ผ่านรางวัลและโทษ
หลักการ — RL สอนหุ่นยนต์โดยให้ทำการทดลองและรับสัญญาณรางวัล (reward) หรือโทษ (penalty) ตามผลลัพธ์ เป้าหมายคือการเพิ่มผลรวมของรางวัลในระยะยาว นี่คือการเรียนรู้แบบ trial-and-error ที่ปรับนโยบาย (policy) ของตัวแทน (agent) เพื่อเลือกการกระทำที่เหมาะสมในสภาพแวดล้อมที่เปลี่ยนแปลง
ตัวอย่างการใช้งาน — การเรียนรู้การหยิบจับชิ้นงาน (robotic grasping) หรือการนำทางในคลังสินค้าแบบอัตโนมัติ โดยงานวิจัยเชิงอุตสาหกรรมชี้ว่า RL แบบที่ปรับปรุงด้าน sample-efficiency สามารถลดจำนวนการทดลองจริงได้มากเมื่อใช้ร่วมกับวิธีอื่น เช่น model-based RL หรือการเริ่มต้นจาก demonstration
-
Imitation Learning: เรียนรู้จากตัวอย่างมนุษย์
หลักการ — เทคนิคนี้ให้หุ่นยนต์เลียนแบบพฤติกรรมจากข้อมูลการกระทำของมนุษย์ (demonstrations) แทนการค้นหานโยบายด้วยการลองผิดลองถูกเพียงอย่างเดียว วิธีนี้ช่วยให้สามารถข้ามช่วงการค้นหาที่ไม่คุ้มค่าและเร่งให้การเรียนรู้เริ่มต้นได้รวดเร็วขึ้น
ตัวอย่างการใช้งาน — ในสายการประกอบ หุ่นยนต์สามารถเรียนรู้การประกอบชิ้นส่วนโดยการดูผู้ชํานาญสาธิต ทำให้ลดเวลาการปรับจูนระบบลงจากสัปดาห์เหลือเป็นวัน หรือชั่วโมงในบางกรณี
-
Sim-to-Real Transfer: ฝึกในซิมูเลชันเพื่อลดค่าใช้จ่ายและความเสี่ยง
หลักการ — การฝึกนโยบายในสภาพแวดล้อมจำลอง (simulation) ที่ควบคุมได้ ช่วยลดต้นทุนและความเสี่ยงจากการทดลองกับฮาร์ดแวร์จริง จากนั้นใช้เทคนิคการถ่ายโอน (transfer) เช่น domain randomization หรือการปรับโมเดลด้วยข้อมูลจริงเพียงเล็กน้อย เพื่อให้พฤติกรรมสามารถทำงานได้ในโลกจริง
ตัวอย่างการใช้งาน — บริษัทด้านรถยนต์ออโตโนมัติใช้ซิมูเลชันขนาดใหญ่ฝึกนโยบายการขับ แล้วปรับด้วยข้อมูลจริงเพียงไม่กี่ชั่วโมงก่อนนำไปทดลองบนถนนจริง ซึ่งช่วยลดความเสี่ยงของการทดสอบบนถนนและลดค่าใช้จ่ายด้านการทดสอบได้อย่างมีนัยสำคัญ
-
Transfer Learning และ Meta-learning: ลดเวลาในการฝึกสำหรับงานใหม่
Transfer Learning — การนำความรู้ที่ได้จากงานหนึ่ง (เช่น น้ำหนักของนิวรอลเน็ตเวิร์กที่เรียนการมองเห็น) มาปรับใช้เป็นจุดเริ่มต้นสำหรับงานใหม่ ช่วยลดจำนวนตัวอย่างและเวลาการฝึก ตัวอย่างเช่น ใช้โมเดลการรับรู้ที่ฝึกบนงานหนึ่งมาเป็นฐานสำหรับการควบคุมหุ่นยนต์ในงานที่มีความคล้ายคลึงกัน
Meta-learning — หรือที่เรียกว่า "เรียนรู้ที่จะเรียนรู้" เป็นกรอบที่ออกแบบให้โมเดลปรับตัวได้รวดเร็วต่องานใหม่หลังจากเห็นตัวอย่างเพียงเล็กน้อย (few-shot). Meta-learning ช่วยให้หุ่นยนต์สามารถเปลี่ยนพฤติกรรมเพื่อตอบโจทย์ภารกิจใหม่ ๆ ในเวลาอันสั้น ซึ่งเหมาะกับธุรกิจที่ต้องการความยืดหยุ่นสูง
ตัวอย่างการใช้งาน — ในคลังสินค้าที่มีสินค้าหลากหลาย Meta-learning ทำให้หุ่นยนต์จัดการชิ้นใหม่ ๆ ได้หลังจากเห็นตัวอย่างเพียงไม่กี่ชิ้น ทำให้ลด downtime และเร่งการขยายสเกลงาน
เมื่อนำเทคนิคเหล่านี้มาผสานกัน — เช่น เริ่มจาก imitation learning เป็นการ initialization แล้วใช้ RL เพิ่มประสิทธิภาพ และฝึกเชิงซิมูเลชันก่อนถ่ายโอนไปยังโลกจริง โดยใช้ transfer และ meta-learning เพื่อให้ปรับตัวกับงานใหม่ — องค์กรจะเห็นการลดเวลาในการพัฒนาระบบหุ่นยนต์อย่างชัดเจน ตัวอย่างเช่น กรณีศึกษาในภาคการผลิตบางแห่งรายงานว่าการใช้แนวทางผสมผสานสามารถลดเวลานำสินค้าเข้าสู่การใช้งาน (time-to-deploy) ได้ถึง 50–80% เมื่อเทียบกับการฝึกทั้งหมดในโลกจริง
โดยสรุป เทคโนโลยีหลักเหล่านี้ไม่เพียงเร่งการเรียนรู้ของหุ่นยนต์ แต่ยังช่วยลดค่าใช้จ่าย เพิ่มความปลอดภัย และเพิ่มความยืดหยุ่นในการใช้งานเชิงธุรกิจ การออกแบบกลยุทธ์ที่เหมาะสมในการผสมผสานเทคนิค RL, imitation learning, sim-to-real, transfer learning และ meta-learning จะเป็นปัจจัยสำคัญที่ทำให้องค์กรสามารถนำหุ่นยนต์อัจฉริยะไปใช้งานได้รวดเร็วและให้ผลตอบแทนทางธุรกิจสูงสุด
งานวิจัยและกรณีศึกษา: ตัวอย่างจริงจากห้องแล็บและอุตสาหกรรม
งานวิจัยและกรณีศึกษา: ตัวอย่างจริงจากห้องแล็บและอุตสาหกรรม
ในช่วงไม่กี่ปีที่ผ่านมา มีงานวิจัยเชิงปฏิบัติหลายโครงการที่แสดงให้เห็นว่าเทคนิค AI สมัยใหม่ เช่น การเรียนรู้เสริม (reinforcement learning), การเรียนรู้เชิงลึก (deep learning) และการใช้การจำลอง (simulation) ร่วมกับ domain randomization สามารถเร่งการเรียนรู้ของหุ่นยนต์และยกระดับความแม่นยำจนเข้าใกล้หรือเกินศักยภาพของมนุษย์ในงานเฉพาะด้าน ตัวอย่างที่โดดเด่นได้แก่โครงการแขนหุ่นยนต์สำหรับการจับและจัดวางวัตถุ, ระบบเคลื่อนที่ที่เรียนรู้การหลบหลีกสิ่งกีดขวาง และผลงานจากห้องแล็บชั้นนำที่ตีพิมพ์ในวรรณกรรมวิชาการและรายงานอุตสาหกรรม

ตัวอย่างที่ 1 — แขน/มือหุ่นยนต์เพื่อการจัดการวัตถุ (In-hand manipulation)
ทีมงาน OpenAI รายงานผลงานเชิงก้าวหน้าในงาน “Solving Rubik’s Cube with a Robot Hand” (OpenAI, 2019) โดยฝึกนโยบายควบคุมมือหุ่นยนต์ในสภาพแวดล้อมจำลองพร้อมการทำ domain randomization จำนวนมาก เพื่อให้ระบบทนต่อความแตกต่างระหว่างซิมกับโลกจริง ผลลัพธ์ชี้ให้เห็นว่าเมื่อเทคนิคการฝึกแบบข้ามโดเมนและการฝึกด้วยตัวอย่างจำลองจำนวนมหาศาลถูกนำมาใช้ หุ่นยนต์สามารถทำการบิดและจัดตำแหน่งลูกบาศก์รูบิคได้ในโลกจริงอย่างต่อเนื่อง ถือเป็นหลักฐานว่าการฝึกในซิมสามารถลดเวลาการทดลองในโลกจริงลงอย่างมีนัยสำคัญ (อ้างอิง: OpenAI, 2019)
ตัวอย่างที่ 2 — การจับ (Grasping) ด้วยเครือข่ายเชิงลึก: Dex-Net
กลุ่ม Berkeley Automation (Dex-Net) พัฒนาแนวทางสร้างชุดข้อมูลสังเคราะห์ขนาดใหญ่ (Dex-Net 2.0 ใช้ประมาณ 6.7 ล้าน ตัวอย่าง point cloud และการจับ) เพื่อฝึกโมเดลการคาดคะเนการจับที่ทนทาน งานวิจัยนี้รายงานว่าการใช้ข้อมูลสังเคราะห์เชิงปริมาณจำนวนมากช่วยให้ประสิทธิภาพการจับในหุ่นยนต์จริงเพิ่มขึ้นอย่างชัดเจนเมื่อเทียบกับวิธีการแบบคลาสสิก โดยในงานทดลองหลายกรณีพบอัตราความสำเร็จของการจับที่สูงขึ้นและความทนทานต่อรูปทรงวัตถุต่าง ๆ มากกว่าเดิม (อ้างอิง: Mahler et al., Dex-Net series)
ตัวอย่างที่ 3 — หุ่นยนต์เคลื่อนที่และการหลบหลีกสิ่งกีดขวาง
ในด้านการนำทางและการหลบหลีกสิ่งกีดขวาง บริษัทด้านยานยนต์อัตโนมัติ (เช่น Waymo) และห้องแล็บวิจัยต่าง ๆ ใช้การจำลองเป็นจำนวนมากเพื่อฝึกนโยบายการวางแผนเส้นทางและการตัดสินใจ ระบบเรียนรู้เหล่านี้ถูกทดสอบด้วยข้อมูลจริงและการจำลองที่ครอบคลุม ผลลัพธ์จากอุตสาหกรรมชี้ว่าเมื่อรวมการฝึกในซิมกับการเรียนรู้แบบเสริม ระบบสามารถลดอัตราการชนหรือเหตุการณ์ผิดพลาดได้อย่างมีนัยสำคัญ โดยบริษัทใหญ่ ๆ รายงานการสะสมไมล์การจำลองเป็น หลายพันล้านไมล์ เพื่อเพิ่มความมั่นคงและครอบคลุมกรณีมุม (corner cases) ที่หายากในโลกจริง (อ้างอิง: รายงานความปลอดภัยทางอุตสาหกรรมและบทความวิจัยจาก Waymo และผู้พัฒนารายอื่น)
ตัวอย่างที่ 4 — การเรียนรู้เชิงวีซูออโมโต (Visuomotor) ในงานอุตสาหกรรม
งานวิจัยของ Levine et al. (เช่น “End-to-end training of deep visuomotor policies”, 2016) แสดงให้เห็นว่าการฝึกนโยบายจากภาพแบบครบวงจรบนหุ่นยนต์อุตสาหกรรม (PR2, Baxter ฯลฯ) ทำให้หุ่นยนต์เรียนรู้การประกอบและการจับวัตถุหลายรูปแบบด้วยตัวอย่างการทดลองจริงในจำนวนที่น้อยกว่าวิธีแบบเดิม บทความนี้เสนอกรอบการฝึกที่ผสมผสานการเรียนรู้แบบชี้นำ (guided policy search) เพื่อเพิ่มประสิทธิภาพการใช้ตัวอย่างและเร่งอัตราการเรียนรู้ในสนามจริง (อ้างอิง: Levine et al., 2016)
ผลการทดลองเชิงตัวเลขและการเร่งการเรียนรู้
จากกรณีศึกษาข้างต้นและงานวิจัยที่เกี่ยวข้อง พบแนวโน้มร่วมกันคือ
- การใช้การจำลองเชิงปริมาณและข้อมูลสังเคราะห์ (เช่น Dex-Net) ช่วยลดจำนวนตัวอย่างจากโลกจริงที่ต้องใช้ลงอย่างมาก และสามารถสร้างชุดข้อมูลขนาดมหาศาล (ล้านตัวอย่าง) เพื่อเร่งการเรียนรู้
- การประยุกต์ domain randomization ช่วยให้การถ่ายโอนจากซิมสู่จริง (sim-to-real transfer) มีผลสำเร็จมากขึ้น — งาน OpenAI แสดงให้เห็นว่าสามารถทำการควบคุมรายละเอียดสูง (in-hand manipulation) ได้จริง
- ในงานนำทาง การฝึกในซิมหลายพันล้านไมล์ช่วยให้จับมุมสถานการณ์หายากได้ดีกว่าเดิม ส่งผลให้อัตราเหตุการณ์ไม่พึงประสงค์ลดลงในการทดสอบสนามจริง
บทเรียนที่ได้และข้อจำกัดจากกรณีศึกษา
- บทเรียนหลัก: การผสานการจำลองความเป็นจริงสูงกับเทคนิค AI สมัยใหม่ทำให้สามารถเร่งการเรียนรู้และลดความเสี่ยงของการทดลองในโลกจริงได้จริง ห้องแล็บที่ลงทุนด้านซอฟต์แวร์จำลองและชุดข้อมูลสังเคราะห์มักจะได้เปรียบในเรื่องความเร็วและขอบเขตของกรณีทดสอบ
- ข้อจำกัดสำคัญ: Sim-to-real gap ยังคงเป็นอุปสรรคหลัก — ถึงแม้ว่าจะมีเทคนิคลดช่องว่าง แต่การถ่ายโอนนโยบายจากซิมสู่ฮาร์ดแวร์จริงยังต้องการการปรับจูนเพิ่มเติมและการทดสอบความปลอดภัย
- ต้นทุนคำนวณและข้อมูล: การฝึกด้วยข้อมูลจำลองจำนวนมหาศาลหรือการรันการเรียนรู้แบบขนานต้องใช้ทรัพยากรคำนวณสูง (GPU/TPU) และโครงสร้างพื้นฐานที่แข็งแกร่ง ซึ่งเป็นข้อจำกัดสำหรับองค์กรขนาดเล็ก
- การทั่วไปของทักษะ: โมเดลที่เรียนรู้ในงานเฉพาะมักขาดความสามารถทั่วไป (generalization) เมื่อต้องเผชิญกับสถานการณ์ใหม่ที่ไม่ได้ถูกจำลองไว้
- ความปลอดภัยและการควบคุม: ระบบที่เรียนรู้ด้วยตนเองต้องผ่านการประเมินความปลอดภัยและกรอบกำกับดูแล เนื่องจากการตัดสินใจผิดพลาดในสภาพแวดล้อมจริงอาจก่อให้เกิดความเสียหาย
โดยสรุป กรณีศึกษาจาก OpenAI, Dex-Net, งานวิจัยของ Levine และรายงานจากอุตสาหกรรมยานยนต์ชี้ให้เห็นว่า AI สามารถทำให้หุ่นยนต์เรียนรู้เร็วขึ้นและแม่นยำขึ้นได้จริง แต่การใช้งานในระดับอุตสาหกรรมต้องคำนึงถึงต้นทุนการคำนวณ, ช่องว่างซิมสู่จริง, ข้อจำกัดด้านการทั่วไปของทักษะ และมาตรฐานความปลอดภัย ก่อนจะนำไปปรับใช้ในสภาพแวดล้อมการผลิตหรือการนำทางที่มีความเสี่ยงสูง (อ้างอิง: OpenAI 2019; Mahler et al., Dex-Net; Levine et al., 2016; รายงานความปลอดภัยจากผู้พัฒนา AV)
สถิติและตัวเลข: ภาพรวมเชิงปริมาณของการเติบโตและประสิทธิภาพ
สถิติและตัวเลข: ภาพรวมเชิงปริมาณของการเติบโตและประสิทธิภาพ
ในเชิงตลาดและการลงทุน ภาพรวมจากรายงานอุตสาหกรรมหลายฉบับชี้ชัดว่าการลงทุนในหุ่นยนต์ร่วมกับปัญญาประดิษฐ์ (AI) ขยายตัวอย่างรวดเร็วในช่วงไม่กี่ปีที่ผ่านมา โดย อัตราการเติบโตต่อปี (CAGR) ของตลาดหุ่นยนต์เชิงพาณิชย์และระบบอัตโนมัติมักถูกรายงานอยู่ในช่วง ประมาณ 15–25% สำหรับทศวรรษ 2020s ขึ้นอยู่กับนิยามของตลาด (เช่น หุ่นยนต์อุตสาหกรรม หุ่นยนต์บริการ หรือหุ่นยนต์สำหรับคลังสินค้า) นอกเหนือจากการเติบโตของตลาดโดยตรง ยังมีการเพิ่มขึ้นของเม็ดเงินลงทุนในสตาร์ทอัพด้าน AI และระบบหุ่นยนต์ ทั้งในรูปแบบลงทุนโดยตรงจากกองทุน VC และการจัดสรรงบวิจัยภายในบริษัทเทคโนโลยีระดับโลก ซึ่งทำให้มีการนำเทคโนโลยีใหม่ไปทดลองเชิงอุตสาหกรรมมากขึ้น
จากมุมงานวิจัยและการทดลองเชิงปฏิบัติการ พบตัวชี้วัดที่บ่งชี้ถึงการปรับปรุงประสิทธิภาพชัดเจน โดยสรุปเป็นแนวโน้มสำคัญได้ดังนี้:
- การลดเวลาฝึก (training time): งานวิจัยหลายชิ้นและรายงานเชิงทดลองรายงานว่าการนำเทคนิคเช่น model-based RL, imitation learning, transfer learning และการใช้ simulation-to-real ลดเวลาที่ต้องใช้ในการฝึกหุ่นยนต์ในงานเฉพาะลงอย่างมีนัยสำคัญ — ตัวอย่างการทดลองรายงานการลดเวลาระหว่าง ประมาณ 10x จนถึง 100x ในบริบทที่จำกัด (เช่น งานจับวางหรือการจัดเรียงชิ้นงานในสภาพแวดล้อมจำลองถึงการนำไปใช้จริง)
- อัตราความสำเร็จของงาน (task success rate): ในชุดงานที่ถูกออกแบบมาเพื่อทดสอบ เช่น การประกอบชิ้นงาน การหยิบจับแบบไม่แน่นอน หรือการนำทางในพื้นที่ซับซ้อน งานวิจัยพบว่าเมื่อผสานโมเดลภาษาขั้นสูงหรือนโยบายเชิงโมเดลเข้ากับการฝึกแบบเรียนรู้เชิงเสริม ทำให้อัตราความสำเร็จจากระดับปานกลาง (30–60%) ขยับขึ้นไปสู่ช่วงสูง (70–95%) ในเงื่อนไขการทดลองที่ถูกจำกัด
- การลดต้นทุนการดำเนินงาน: รายงานกรณีศึกษาของโรงงานหรือคลังสินค้าระบุว่าการใช้หุ่นยนต์อัจฉริยะช่วยลดต้นทุนแรงงานหรือเวลาในการปฏิบัติงานได้ในระดับที่วัดได้ — โดยการคำนวณเบื้องต้นแสดงการลดต้นทุนต่อหน่วยงานหรือการดำเนินการลงได้ ประมาณ 30–60% ขึ้นกับลักษณะงานและค่าใช้จ่ายเริ่มต้น
- การเพิ่มประสิทธิภาพการใช้งานอุปกรณ์: ตัวชี้วัดเช่น throughput หรือชิ้นงานต่อชั่วโมงในคลังสินค้าหรือสายการผลิตมักเพิ่มขึ้น 20–50% หลังการติดตั้งระบบหุ่นยนต์+AI ที่ออกแบบมาเหมาะสมกับงาน
อย่างไรก็ตาม การตีความตัวเลขเหล่านี้จำเป็นต้องระมัดระวังและใส่บริบทประกอบอย่างรอบคอบ เพราะตัวชี้วัดแต่ละประเภทมีข้อจำกัดชัดเจน:
- ความแตกต่างของสเกลและสภาพแวดล้อม — ผลลัพธ์ที่ได้จากการทดลองในห้องแลบหรือสภาพแวดล้อมจำลองมักไม่สามารถเทียบตรงกับการใช้งานในไซต์จริงที่มีความไม่แน่นอนสูง เช่น ฝุ่น ความแตกต่างของชิ้นงาน หรือการหยุดชะงักด้านซัพพลายเชน
- การเลือกงานทดสอบ (benchmarking bias) — งานวิจัยมักเลือกงานที่เหมาะกับวิธีการที่พัฒนา ทำให้ผลลัพธ์ดูโดดเด่นกว่าการใช้งานทั่วไป การเปรียบเทียบระหว่างงานจึงต้องพิจารณาความซับซ้อนและมาตรฐานของ benchmark
- การวัดค่าใช้จ่ายรวม (TCO) และ ROI — การลดต้นทุนต่อหน่วยงานไม่ได้แปลว่าการลงทุนคุ้มค่าเสมอไป ต้องนำค่าใช้จ่ายด้านฮาร์ดแวร์ การซ่อมบำรุง การฝึกบุคลากร และค่าอินทิเกรชันมาคำนวณ
- ประเด็นความเป็นมาตรฐานและการทำซ้ำได้ — มีความไม่สอดคล้องกันในวิธีการรายงานผลระหว่างงานวิจัยและเอกสารเชิงอุตสาหกรรม ทำให้การสรุปเชิงปริมาณต้องอาศัยการพิจารณาจากหลายแหล่งอย่างรอบคอบ
สรุปแล้ว ตัวเลขจากรายงานอุตสาหกรรมและงานวิจัยสะท้อนแนวโน้มที่ชัดเจน: การลงทุนและการนำ AI มาประยุกต์ใช้กับหุ่นยนต์กำลังขับเคลื่อนให้เกิดการเพิ่มประสิทธิภาพทั้งในเชิงเวลาและผลผลิต อย่างไรก็ดี ผลลัพธ์เฉพาะเชิงปริมาณมักพึ่งพาบริบทการทดลอง และการวัดผลที่หลากหลาย ผู้บริหารควรผสมผสานข้อมูลเชิงปริมาณเหล่านี้กับการประเมินเชิงคุณภาพและการวิเคราะห์ความเสี่ยงก่อนตัดสินใจลงทุนขนาดใหญ่
ผลกระทบต่อการศึกษาและการฝึกอบรม: ปรับหลักสูตรอย่างไรให้ทันโลก
เมื่อปัญญาประดิษฐ์ช่วยให้หุ่นยนต์เรียนรู้เร็วและมีความสามารถสูงขึ้น โรงเรียน มหาวิทยาลัย และสถาบันฝึกอบรมจึงต้องเร่งปรับตัวเชิงโครงสร้างเพื่อให้ผู้เรียนพร้อมรับงานและการทำงานร่วมกับระบบอัตโนมัติ การปรับหลักสูตรไม่เพียงแต่เป็นการเพิ่มรายวิชาใหม่ ๆ เท่านั้น แต่ต้องเป็นการออกแบบระบบการเรียนรู้ที่ข้ามศาสตร์ (interdisciplinary), เน้นการปฏิบัติจริง และรองรับการเรียนรู้ตลอดชีวิต (lifelong learning) อย่างมีประสิทธิภาพ
แนวทางปรับหลักสูตร: ผสมผสาน AI, ระบบควบคุม และจริยธรรม
สถาบันการศึกษาควรสร้างหลักสูตรที่รวมองค์ความรู้ด้านต่อไปนี้อย่างเป็นระบบและเชื่อมโยงกัน:
- พื้นฐาน AI และ Machine Learning: แนวคิดการเรียนรู้ของเครื่อง, การประมวลผลข้อมูล, โมเดลเชิงสถิติ และการประเมินผล
- ระบบควบคุมและหุ่นยนต์: การควบคุมเชิงนิวเมติกส์/อิเล็กทรอนิกส์, เซ็นเซอร์และการผสานข้อมูล (sensor fusion), การวางแผนเส้นทาง (path planning)
- การออกแบบซอฟต์แวร์และระบบฝังตัว: การพัฒนาแบบโมดูลาร์, ความสามารถในการอัปเดตแบบไร้สาย และซอฟต์แวร์ปลอดภัย
- จริยธรรม เทคโนโลยีและกฎหมาย: ความเป็นส่วนตัวของข้อมูล, ความรับผิดชอบเมื่อตัดสินใจโดยอัตโนมัติ, ผลกระทบทางสังคมและกฎระเบียบ
- ทักษะข้ามศาสตร์: การสื่อสาร, การจัดการโครงการ, การออกแบบบริการ และการวิเคราะห์เชิงธุรกิจ เพื่อให้ผู้เชี่ยวชาญทางเทคนิคสามารถทำงานร่วมกับผู้บริหารและผู้ใช้งาน
การสอนควรเน้น project-based learning และห้องทดลอง (labs) ที่ใช้หุ่นยนต์จริงหรือซิมูเลเตอร์เพื่อให้ผู้เรียนได้ปฏิบัติ เช่น คอร์ส capstone ที่ให้นักศึกษาพัฒนาหุ่นยนต์เพื่อแก้โจทย์เชิงอุตสาหกรรมจริง และการบูรณาการกรณีศึกษาที่สะท้อนประเด็นจริยธรรมและความปลอดภัย
การฝึกอบรมภาคอุตสาหกรรมและโมเดล reskilling/upskilling
ภาคอุตสาหกรรมต้องร่วมมือกับสถาบันการศึกษาเพื่อนำเสนอโปรแกรมฝึกอบรมที่ตอบโจทย์ทักษะทันที เช่น โปรแกรมเร่งรัด (bootcamps), โมดูลทักษะสั้น (micro-credentials), และการฝึกอบรมในที่ทำงาน (on-the-job training) ที่ใช้หุ่นยนต์และแพลตฟอร์มจำลองจริง นอกเหนือจากการอบรมเชิงเทคนิคแล้ว ควรเพิ่มหลักสูตรที่เน้นการเปลี่ยนผ่านอาชีพ (career transition) สำหรับพนักงานที่ต้องการ reskill
- โมเดล stackable credentials: ให้ผู้เรียนสะสมหน่วยกิตหรือใบรับรองย่อยที่สามารถต่อยอดเป็นวุฒิการศึกษาหลักได้
- การเรียนรู้แบบผสมผสาน (blended learning): รวมการเรียนออนไลน์เพื่อทฤษฎีและชั้นปฏิบัติภาคสนามเพื่อทักษะเชิงปฏิบัติ
- การใช้หุ่นยนต์เป็นเครื่องมือฝึกอบรม: หุ่นยนต์ขนาดเล็กและซอฟต์แวร์จำลองช่วยให้การฝึกทักษะปลอดภัยและลดต้นทุนการทดลองจริง
- การวัดผลและการรับรองที่ยอมรับในอุตสาหกรรม: พัฒนาเกณฑ์ประเมินทักษะที่เป็นมาตรฐานร่วมกับภาคเอกชนเพื่อให้การรับรองมีน้ำหนักทางตลาดแรงงาน
ตามรายงานขององค์การระหว่างประเทศหลายแห่ง การเปลี่ยนแปลงทางทักษะอย่างกว้างขวางกำลังเกิดขึ้น: World Economic Forum ประเมินว่าแรงงานจำนวนมากจะต้องได้รับการ reskilling ภายในปี 2025 ซึ่งสะท้อนความจำเป็นของโปรแกรมฝึกอบรมที่ยืดหยุ่นและมีประสิทธิภาพ
ตัวอย่างโปรแกรมการศึกษาที่ประสบความสำเร็จ
หลายสถาบันทั่วโลกได้พัฒนารูปแบบที่สามารถยกเป็นตัวอย่างได้:
- มหาวิทยาลัยและสถาบันวิจัยเชิงบูรณาการ: โครงการของ MIT Schwarzman College of Computing และ Carnegie Mellon Robotics Institute ที่รวมคณิตศาสตร์ วิศวกรรม วิทยาศาสตร์คอมพิวเตอร์ และมนุษยศาสตร์เข้าด้วยกัน เพื่อผลิตบัณฑิตที่มีมุมมองกว้างและทักษะลึกด้านหุ่นยนต์
- นโยบายชาติกับการฝึกอาชีพ: โครงการอย่าง AI Singapore และ SkillsFuture ในสิงคโปร์ ที่สนับสนุนการอบรมระยะสั้นและเงินอุดหนุนแก่แรงงานในการ reskill/upskill
- แพลตฟอร์มการเรียนรู้ออนไลน์และโปรแกรมร่วมกับอุตสาหกรรม: คอร์สเชิงปฏิบัติจากผู้ให้บริการคลาวด์และเทคโนโลยี (เช่น Google AI Residency, AWS Machine Learning หรือ Coursera/Deeplearning.ai specializations) ที่ผสานโปรเจ็กต์จริงและการรับรองที่เป็นที่ยอมรับ
- ความร่วมมือมหาวิทยาลัย-อุตสาหกรรม: สถาบันที่มีสหกิจศึกษา (co-op) และโปรแกรมฝึกงานเชิงลึก ช่วยให้ผู้เรียนมีโอกาสทำงานกับหุ่นยนต์จริงภายใต้ข้อกำกับของภาคอุตสาหกรรม
สรุปแล้ว การปรับหลักสูตรให้ทันโลกจำเป็นต้องเป็นการเปลี่ยนแปลงเชิงระบบที่ผสมผสานศาสตร์ เทคโนโลยี และจริยธรรม พร้อมกับสร้างโครงสร้างการเรียนรู้ที่ยืดหยุ่น รองรับการเรียนรู้ตลอดชีวิต และเชื่อมต่อกับตลาดแรงงานผ่านความร่วมมือระหว่างภาคการศึกษาและภาคอุตสาหกรรม การลงทุนด้านโครงสร้างพื้นฐานเช่นห้องทดลองหุ่นยนต์ ซิมูเลเตอร์ และการพัฒนาบุคลากรผู้สอน จะเป็นกุญแจสำคัญในการสร้างกำลังคนที่พร้อมรับอนาคตของการทำงานร่วมกับหุ่นยนต์อัจฉริยะ
ข้อกังวลด้านจริยธรรม กฎหมาย และความปลอดภัย
ข้อกังวลด้านจริยธรรม กฎหมาย และความปลอดภัย
การนำ AI มาใช้เพื่อเร่งการเรียนรู้และเพิ่มความสามารถให้หุ่นยนต์ แม้ว่าจะสร้างประโยชน์เชิงเศรษฐกิจและประสิทธิภาพในการปฏิบัติงาน แต่ก็ตามมาด้วยความเสี่ยงด้านจริยธรรม กฎหมาย และความปลอดภัยที่ต้องได้รับการจัดการอย่างเป็นระบบ ผู้เชี่ยวชาญหลายสำนักชี้ว่า ความเสี่ยงด้านความปลอดภัยไซเบอร์ ไม่เพียงหมายถึงการเข้าถึงข้อมูลส่วนบุคคลเท่านั้น แต่รวมถึงการโจมตีโมเดล (เช่น adversarial attacks, model inversion, data poisoning) ที่อาจทำให้การตัดสินใจของหุ่นยนต์ผิดพลาดหรือถูกบิดเบือนได้ ตัวอย่างเช่น การโจมตีด้วยตัวอย่างประหลาด (adversarial examples) สามารถทำให้ระบบรู้จำภาพผิดพลาดได้ แม้ในสภาพแวดล้อมจริงซึ่งมีผลต่อความปลอดภัยทางกายภาพของมนุษย์และทรัพย์สิน
ด้านความเป็นส่วนตัว การฝึกสอนโมเดลด้วยข้อมูลผู้ใช้อาจเปิดช่องให้เกิดการรั่วไหลของข้อมูลส่วนบุคคลผ่านเทคนิคการย้อนรอยโมเดล (model inversion) หรือการสกัดข้อมูล (membership inference) ซึ่งเป็นความเสี่ยงที่สำคัญเมื่อหุ่นยนต์ทำงานร่วมกับผู้คนในบริบทที่มีข้อมูลอ่อนไหว เช่น โรงพยาบาล บ้านพักผู้สูงอายุ หรือสถานที่ทำงาน การป้องกันต้องอาศัยเทคนิคเช่น การทำ differential privacy, federated learning และการควบคุมการเข้าถึงข้อมูลอย่างเข้มงวด
ผลกระทบต่อแรงงานเป็นอีกประเด็นเชิงนโยบายที่ไม่ควรมองข้าม งานวิจัยหลายชิ้นรวมทั้งการประเมินของ McKinsey พบว่าประมาณครึ่งหนึ่งของกิจกรรมการทำงานมีศักยภาพถูกอัตโนมัติในระดับหนึ่ง ขณะที่รายงานของ World Economic Forum ระบุว่าในช่วงทศวรรษถัดไปอาจเกิดการเปลี่ยนแปลงตำแหน่งงานจำนวนมาก (ตัวเลขเช่นการคาดการณ์การหายไปของงานและการสร้างงานใหม่มีความแตกต่างตามภาคอุตสาหกรรมและภูมิภาค) ดังนั้นภาครัฐและภาคธุรกิจจึงต้องวางแผนมาตรการคุ้มครองและช่วยเหลือแรงงาน ได้แก่ การฝึกทักษะใหม่ (reskilling/upskilling), ระบบประกันรายได้ชั่วคราว, และการสนับสนุนการโยกย้ายสู่ตำแหน่งงานที่มีมูลค่าสูงขึ้น
ในมิติทางกฎหมาย ความรับผิดชอบเมื่อหุ่นยนต์หรือระบบอัตโนมัติทำผิดพลาดเป็นปัญหาที่ซับซ้อน ระหว่างผู้พัฒนา ผู้ผลิต ผู้ติดตั้ง และผู้ใช้งาน แนวทางที่เป็นไปได้ประกอบด้วยการประยุกต์ใช้หลักความรับผิดตามผลิตภัณฑ์ (product liability), การกำหนดกรอบหน้าที่การดูแล (duty of care) และการสร้างระบบการรายงานเหตุการณ์ที่โปร่งใส ปัจจุบันกฎหมายและมาตรฐานระดับสากล เช่น EU AI Act ที่มุ่งกำกับ AI ตามระดับความเสี่ยง, NIST AI Risk Management Framework และมาตรฐานด้านหุ่นยนต์และความปลอดภัย (เช่น ISO 10218 สำหรับหุ่นยนต์อุตสาหกรรม, ISO 13482 สำหรับหุ่นยนต์ให้การดูแลส่วนบุคคล) เป็นจุดเริ่มต้นที่สำคัญ แต่ยังต้องมีการปฏิรูปเชิงนโยบายเพิ่มเติมเพื่อรองรับเทคโนโลยีที่พัฒนาเร็ว
เพื่อบรรเทาความเสี่ยงและสร้างความเชื่อมั่นต่อสังคม ควรดำเนินมาตรการเชิงปฏิบัติและเชิงนโยบายควบคู่กัน ดังนี้
- มาตรการด้านความปลอดภัยของระบบ: นำแนวทาง defense-in-depth มาใช้ ได้แก่ secure SDLC, การทดสอบ penetration testing และ red-teaming, การใช้ adversarial training, การติดตั้งระบบตรวจจับความผิดปกติและการปิดระบบฉุกเฉิน (kill-switch) สำหรับหุ่นยนต์ที่มีความเสี่ยงสูง
- การคุ้มครองข้อมูลส่วนบุคคล: ใช้เทคนิคเช่น differential privacy และ federated learning ลดการรวบรวมข้อมูลสำคัญแบบรวมศูนย์ รวมถึงการกำหนดนโยบายการเก็บข้อมูลที่ชัดเจนและโปร่งใสต่อผู้ใช้
- การคุ้มครองแรงงาน: ออกมาตรการฝึกอบรมและสนับสนุนการเปลี่ยนสายงาน ทั้งจากภาครัฐและเอกชน รวมถึงการพัฒนาโครงการประกันรายได้และสวัสดิการในระหว่างการเปลี่ยนผ่าน
- กรอบกฎหมายและมาตรฐาน: กำหนดข้อบังคับแบบความเสี่ยงเป็นศูนย์กลาง (risk-based regulation), บังคับให้มีการประเมินความเสี่ยงและการรับรองความปลอดภัยก่อนออกสู่ตลาด, และสร้างระบบการรายงานเหตุการณ์ความปลอดภัยโดยบังคับใช้กับผลิตภัณฑ์ที่ถือว่าเป็น high-risk
- ความโปร่งใสและการตรวจสอบได้: กำหนดให้มีการเก็บบันทึกการตัดสินใจของโมเดล (audit trails), การทดสอบภายนอก (third-party audits) และการเปิดเผยข้อมูลพื้นฐานเกี่ยวกับประสิทธิภาพและข้อจำกัดของระบบต่อผู้ใช้
สรุปว่า ความก้าวหน้าของ AI ในการช่วยหุ่นยนต์เรียนรู้เร็วขึ้นและฉลาดขึ้นเป็นโอกาสทางเศรษฐกิจและนวัตกรรมที่ยิ่งใหญ่ แต่ต้องมาพร้อมกับกรอบบริหารจัดการความเสี่ยงอย่างเป็นระบบ ทั้งด้านความปลอดภัยไซเบอร์ ความเป็นส่วนตัว ผลกระทบต่อแรงงาน และกฎหมายความรับผิด เพื่อให้เทคโนโลยีนี้เติบโตอย่างยั่งยืนและเป็นประโยชน์ต่อสังคมโดยรวม
อนาคตและข้อเสนอแนะ: แนวทางสำหรับผู้กำหนดนโยบายและสถาบันการศึกษา
แนวโน้มอนาคต: ระยะสั้น (1–3 ปี) และระยะยาว (5–15 ปี)
ในระยะสั้น คาดว่าการพัฒนาหุ่นยนต์ที่เรียนรู้ด้วย AI จะเน้นการปรับปรุง sample efficiency และการใช้การจำลอง (simulation) เพื่อเร่งการฝึกสอนก่อนนำไปทดสอบในโลกจริง งานวิจัยและภาคเอกชนจำนวนมากรายงานว่าเทคนิคเช่นการถ่ายโอนความรู้จากการจำลองสู่การปฏิบัติจริง (sim-to-real), การเรียนรู้แบบเสริมกำลัง (reinforcement learning) ที่ผสมกับการเรียนรู้เชิงนัย (meta-learning) สามารถลดเวลาการฝึกลงได้อย่างมีนัยสำคัญ โดยหน่วยงานและห้องปฏิบัติการชั้นนำ เช่น MIT, ETH Zurich และ TUM ได้เปิดโครงการนำร่องร่วมกับภาคอุตสาหกรรมเพื่อทดสอบแนวทางเหล่านี้
ในระยะยาว ภายใน 5–15 ปี เราอาจเห็นหุ่นยนต์ที่มีความสามารถในการเรียนรู้อย่างต่อเนื่อง (continual learning) และปรับตัวได้ในสภาพแวดล้อมที่ไม่แน่นอน ซึ่งจะส่งผลให้เกิดการเปลี่ยนแปลงเชิงโครงสร้างในภาคการศึกษาและแรงงาน รายงานเชิงวิเคราะห์ชี้ว่าระหว่าง 20–40% ของงานบางประเภทอาจเปลี่ยนแปลงรูปแบบการทำงานหรือถูกแทนที่ด้วยระบบอัตโนมัติ ซึ่งเป็นเหตุให้มหาวิทยาลัยและบริษัทต้องรีออกแบบหลักสูตรและโครงสร้างการฝึกอบรมเพื่อเน้นทักษะการบริหารจัดการ AI, ความร่วมมือมนุษย์–หุ่นยนต์ และการคิดเชิงวิพากษ์
ข้อเสนอแนะเชิงนโยบาย: การลงทุน กำกับดูแล และแรงจูงใจทางการศึกษา
การลงทุน: รัฐบาลควรจัดสรรงบประมาณสนับสนุนงานวิจัยด้านการเรียนรู้ของหุ่นยนต์และการทดสอบความปลอดภัยเป็นพิเศษ โดยตั้งกองทุนสำหรับโครงการร่วมระหว่างมหาวิทยาลัยและภาคอุตสาหกรรม เช่น เงินทุนให้ทดลอง (grants for pilots), เครดิตภาษี R&D, และการให้ทุนคลาวด์/ฮาร์ดแวร์เพื่อการจำลอง ในระดับเป้าหมาย ควรเพิ่มสัดส่วนการลงทุนด้านเทคโนโลยีเชิงปฏิบัติจากงบวิจัยรวมอย่างน้อย 10–20% ภายใน 3–5 ปีแรก
การกำกับดูแลและมาตรฐาน: จำเป็นต้องเร่งรัดการกำหนดกรอบข้อบังคับที่ชัดเจนเกี่ยวกับความปลอดภัยของหุ่นยนต์ที่เรียนรู้ด้วย AI ซึ่งรวมถึงมาตรฐานการทดสอบซ้ำได้ (reproducibility), การรายงานเหตุความล้มเหลว (failure reporting), และการประเมินความเสี่ยงก่อนการนำไปใช้งานจริง ควรตั้งหน่วยงานหรือคณะทำงานระดับชาติเพื่อร่วมกำหนดมาตรฐานร่วมกับองค์กรระหว่างประเทศ เช่น ISO และ IEC
แรงจูงใจทางการศึกษา: รัฐบาลและหน่วยงานการศึกษาควรสนับสนุนให้มหาวิทยาลัยปรับหลักสูตรฝึกอบรมให้ทันสมัย โดยมีแรงจูงใจเช่นทุนการศึกษา โครงการฝึกงานร่วมกับอุตสาหกรรม และการรับรองหลักสูตร (accreditation) ที่เน้นทักษะการประยุกต์ใช้ AI กับระบบหุ่นยนต์ การให้ทุนสนับสนุนการพัฒนาหลักสูตรระยะสั้น (micro-credentials) และการเรียนรู้ออนไลน์จะช่วยขยายการเข้าถึงทักษะไปยังแรงงานที่มีอยู่
คำแนะนำสำหรับองค์กร: การทดลองนำร่อง ความร่วมมือข้ามภาค และการวัดผล
- เริ่มจากโครงการนำร่อง (pilot) — แนะนำให้มหาวิทยาลัยและบริษัทเริ่มจากโครงการขนาดเล็กที่มีขอบเขตชัดเจนเพื่อตรวจสอบความเป็นไปได้ (feasibility) และวัดประสิทธิภาพ เช่น โครงการหุ่นยนต์ชำนาญภารกิจเฉพาะ (task-specific) ภายใน 6–12 เดือน จากนั้นขยายตามผลลัพธ์ที่วัดได้
- สร้างเครือข่ายความร่วมมือข้ามภาคส่วน — ส่งเสริมการร่วมมือระหว่างสถาบันการศึกษา บริษัทเทคโนโลยี และหน่วยงานภาครัฐ เพื่อแลกเปลี่ยนข้อมูล ทดสอบแนวปฏิบัติที่ดีที่สุด และร่วมพัฒนาแพลตฟอร์มจำลองและชุดข้อมูล (shared simulation platforms & datasets)
- กำหนดเกณฑ์วัดผล (KPIs) ที่ชัดเจน — วัดผลทั้งเชิงเทคนิคและเชิงสังคม ตัวอย่าง KPIs ได้แก่ อัตราการลดเวลาการฝึก (training time reduction), การเพิ่มขึ้นของประสิทธิภาพงานเทียบมนุษย์ (performance delta vs human baseline), อัตราความล้มเหลวต่อการปฏิบัติ (failure rate per operation), เวลาในการย้ายจากการจำลองสู่การปฏิบัติจริง (sim-to-real transfer time) และผลกระทบด้านแรงงาน/การจ้างงานภายในองค์กร
- ให้ความสำคัญกับความปลอดภัยและความยุติธรรม — รวมการประเมินผลกระทบด้านจริยธรรมและสังคมในระยะเริ่มต้นของโครงการ เช่น การตรวจสอบ bias, การปกป้องข้อมูล และแนวทางการป้องกันการละเมิดระบบ
- ลงทุนในบุคลากรและวัฒนธรรมการเรียนรู้ — จัดแผนฝึกอบรมสำหรับพนักงานทั้งเชิงเทคนิคและเชิงบริหาร สร้างทีมผสมที่ประกอบด้วยนักวิจัย วิศวกร นักบริหาร และผู้เชี่ยวชาญด้านจริยธรรม เพื่อให้โครงการสามารถปรับตัวได้อย่างยั่งยืน
สรุปแล้ว การก้าวสู่ยุคที่หุ่นยนต์เรียนรู้ด้วย AI แสดงศักยภาพสูงแต่ต้องการการจัดการเชิงนโยบายและเชิงปฏิบัติที่สมดุล ระหว่างการลงทุนด้านวิจัย การตั้งมาตรฐานความปลอดภัย และการส่งเสริมความร่วมมือข้ามภาคส่วน หากรัฐบาล มหาวิทยาลัย และภาคเอกชนร่วมมือกันอย่างเป็นระบบ จะสามารถเร่งการนำเทคโนโลยีไปใช้ประโยชน์ได้อย่างปลอดภัยและเป็นธรรม พร้อมทั้งเตรียมแรงงานและสังคมรับมือการเปลี่ยนแปลงในอนาคต
บทสรุป
AI ได้เปลี่ยนวิธีที่หุ่นยนต์เรียนรู้อย่างมีนัยสำคัญ ทำให้การฝึกสอนและการปรับตัวเร็วขึ้นจนสามารถรับมือกับงานที่มีความซับซ้อนสูง เช่น การประกอบชิ้นส่วนขนาดเล็ก การควบคุมในสภาพแวดล้อมไม่แน่นอน และการประมวลผลเชิงอัตโนมัติที่ต้องใช้การตัดสินใจแบบเรียลไทม์ เทคนิคอย่างการเรียนรู้เสริม (reinforcement learning), การถ่ายโอนความรู้ (transfer learning) และการจำลองในระดับใหญ่ (sim-to-real) ช่วยลดเวลาในการพัฒนาต้นแบบและเพิ่มความสามารถของหุ่นยนต์ได้อย่างชัดเจน อย่างไรก็ดี การนำเทคโนโลยีเหล่านี้ไปใช้ต้องชั่งน้ำหนักระหว่างประโยชน์ทางเศรษฐกิจและประสิทธิภาพกับความเสี่ยงด้านความปลอดภัย ความเป็นส่วนตัว การเบี่ยงเบนผลลัพธ์จากอคติในข้อมูลฝึก และผลกระทบต่อการจ้างงานและทักษะของแรงงานมนุษย์
การเตรียมความพร้อมในเชิงนโยบายและการศึกษาเป็นสิ่งจำเป็น: ภาคการศึกษา ภาคอุตสาหกรรม และภาครัฐต้องร่วมมือกันออกแบบหลักสูตรการศึกษาและการฝึกอบรมที่เน้นทักษะเชิงเทคนิคและเชิงจริยธรรม ควบคู่กับการวางกรอบนโยบายที่ชัดเจน เช่น มาตรฐานความปลอดภัย การรับรองระบบ การทดสอบเชิงสาธารณะ และกลไกการตรวจสอบที่โปร่งใส เพื่อให้เกิดการพัฒนาอย่างยั่งยืนในอนาคต มุมมองในระยะยาวควรมุ่งไปที่การส่งเสริมการเรียนรู้ตลอดชีวิต (lifelong learning), การยกระดับทักษะแรงงาน (reskilling) และการออกแบบระบบที่ทำงานร่วมกับมนุษย์อย่างปลอดภัยและมีคุณธรรม โดยรักษาสมดุลระหว่างนวัตกรรมกับการคุ้มครองสาธารณะและความยุติธรรม
📰 แหล่งอ้างอิง: Tech Xplore